ラピロ、手を振って歩こうよ。
ゴール設定(ラピロのファームウェアを改造して、手を振りながら歩かせる)
ラピロが歩くとき(前進コマンド#M1)、ラピロの上半身は動かず固定されたまま、足だけで歩いているので、ぎこちない動作となっているよね。普通に、手を振りながら歩けば、もっとスムーズな動作になるんじゃないかな。ここでは、量産型として提供されているサンプルのArduinoファームウェアを改造して、例えば、「前進」コマンドでは、上半身と腕の振りをプラスして、直進性能1.3倍を目指そう。うまく行きそうなら、その他の動作コマンド(#M1~10までの全10パターン)も改造しよう。

やってみる
事前準備(Arduinoファームウェアの動作パターンを変更する)
Arduinoファームウェアを読むと、ラピロの各動作コマンドに8つの動作が書き込まれている。各行ともに左から8個のモーターが同じ数字(角度)になっているので、上半身が固定されたままなのです。そこで、足の動きに合わせて、腰・腕・頭のモーター角度を変更してみましょう。
▼ 変更前
{ // 1 Forward
{ 90, 90, 0, 90, 90,180, 90, 90, 80,110, 80,120, 0, 0, 0, 3},
{ 90, 90, 0, 90, 90,180, 90, 90, 70, 90, 70, 90, 0, 0,255, 3},
{ 90, 90, 0, 90, 90,180, 90, 90, 70, 70, 70, 80, 0, 0,255, 3},
{ 90, 90, 0, 90, 90,180, 90, 90,100, 60, 92, 70, 0, 0, 0, 3},
{ 90, 90, 0, 90, 90,180, 90, 90,110, 90,102, 90, 0, 0,255, 3},
{ 90, 90, 0, 90, 90,180, 90, 90,110,100,110,110, 0, 0,255, 3},
{ 90, 90, 0, 90, 90,180, 90, 90, 90, 90, 90, 90, 0, 0, 0, 0},
{ 90, 90, 0, 90, 90,180, 90, 90, 90, 90, 90, 90, 0, 0, 0, 0}
},
▼ 変更後
{ // 1 Forward aggresive
{ 90, 90, 0, 90, 90,180, 90, 90, 80,100, 80,120, 0,255, 0, 3},
{ 90, 90, 30, 90, 90,180, 90, 90, 70, 90, 60, 80, 0, 0,255, 5},
{ 70,110, 50, 90, 90,180, 90, 90, 70, 70, 60, 80, 0, 0,255, 3},
{ 90, 90, 0, 90, 90,180, 90, 90,100, 60, 92, 70, 0,255, 0, 3},
{ 90, 90, 0, 90, 90,120, 90, 90,110, 90,102, 90, 0, 0,255, 5},
{100, 70, 0, 90, 90,100, 90, 90,110,100,110,110, 0, 0,255, 3},
{ 90, 90, 0, 90, 90,180, 90, 90, 80,100, 80,120,255, 0, 0, 0},
{ 90, 90, 0, 90, 90,180, 90, 90, 80,100, 80,120,255, 0, 0, 0}
},
実験(書き換えたコマンドを実行してみる[動画]。)
実際に上半身の動きをプラスした歩き方を動画で確認ください。前進や更新の他、ばいばいのスピードアップとかやってます。本当はビームライフルで「ぴしぷー♪」とか、ビームサーベルで「ぶーん♪」とかやりたいんだけどね、手の関節が少ないんだよねー、残念。
動作パラメータを簡単に作る工夫
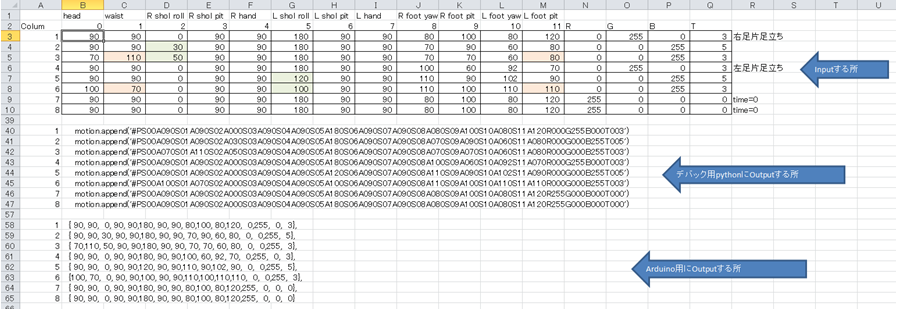
12個もあるサーボモーターの位置を確認して、テストコマンドやファームウェアの書式に毎回書き直すのは大変なので、モーター角度を入力したら自動でpythonコマンドやArduino配列データに変換するExcelファイルを作ったので、デバックにかかる時間を大幅に短縮できた。
改造後のサンプルコード
私のラピロでの設定値です。最初に組み立てたときのサーボモーターの位置合わせで初期の角度調整が必要です。
// by ShotaIshiwatari is licensed under the Creative Commons - Public Domain Dedication license. // Modified by IchiroKANO; Changed all of sample commands to aggressive motions. #include#define SHIFT 7 #define R 0 // Red LED #define G 1 // Green LED #define B 2 // Blue LED #define TIME 15 // Column of Time #define MAXSN 12 // Max Number of Servos #define MAXMN 11 // Max Number of Motions #define MAXFN 8 // Max Number of Frames #define POWER 17 // Servo power supply control pin #define ERR -1 // Error int i = 0; int t = 1; Servo servo[MAXSN]; uint8_t eyes[3] = { 0, 0, 0}; // Fine angle adjustments (degrees) int trim[MAXSN] = { -5, // Head yaw 8, // Waist yaw 0, // R Sholder roll -5, // R Sholder pitch 0, // R Hand grip 25, // L Sholder roll 15, // L Sholder pitch 0, // L Hand grip 0, // R Foot yaw 1, // R Foot pitch -7, // L Foot yaw 7}; // L Foot pitch int nowAngle[MAXSN] = { 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0}; // Initialize array to 0 int targetAngle[MAXSN] = { 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0}; // Initialize array to 0 int deltaAngle[MAXSN] = { 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0}; // Initialize array to 0 uint8_t bufferAngle[MAXSN] = { 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0}; // Initialize array to 0 uint8_t tempAngle[MAXSN] = { 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0}; // Initialize array to 0 int nowBright[3] = { 0, 0, 0}; // Initialize array to 0 int targetBright[3] = { 0, 0, 0}; // Initialize array to 0 int deltaBright[3] = { 0, 0, 0}; // Initialize array to 0 uint8_t bufferBright[3] = { 0, 0, 0}; // Initialize array to 0 uint8_t tempBright[3] = { 0, 0, 0}; // Initialize array to 0 double startTime = 0; // Motion start time(msec) double endTime = 0; // Motion end time(msec) int remainingTime = 0; // Motion remaining time(msec) uint8_t bufferTime = 0; // Motion buffer time (0.1sec) uint8_t motionNumber = 0; uint8_t frameNumber = 0; char mode = 'M'; uint8_t motion[MAXMN][MAXFN][16]={ { // 0 Stop { 90, 90, 0,130, 90,180, 50, 90, 90, 90, 90, 90, 0, 0,255, 10}, { 90, 90, 0,130, 90,180, 50, 90, 90, 90, 90, 90, 0, 0, 0, 0}, { 90, 90, 0,130, 90,180, 50, 90, 90, 90, 90, 90, 0, 0, 0, 0}, { 90, 90, 0,130, 90,180, 50, 90, 90, 90, 90, 90, 0, 0, 0, 0}, { 90, 90, 0,130, 90,180, 50, 90, 90, 90, 90, 90, 0, 0, 0, 0}, { 90, 90, 0,130, 90,180, 50, 90, 90, 90, 90, 90, 0, 0, 0, 0}, { 90, 90, 0,130, 90,180, 50, 90, 90, 90, 90, 90, 0, 0, 0, 0}, { 90, 90, 0,130, 90,180, 50, 90, 90, 90, 90, 90, 0, 0, 0, 0} }, { // 1 Forward aggresive { 90, 90, 0, 90, 90,180, 90, 90, 80,100, 80,120, 0,255, 0, 3}, { 90, 90, 30, 90, 90,180, 90, 90, 70, 90, 60, 80, 0, 0,255, 5}, { 70,110, 50, 90, 90,180, 90, 90, 70, 70, 60, 80, 0, 0,255, 3}, { 90, 90, 0, 90, 90,180, 90, 90,100, 60, 92, 70, 0,255, 0, 3}, { 90, 90, 0, 90, 90,120, 90, 90,110, 90,102, 90, 0, 0,255, 5}, {100, 70, 0, 90, 90,100, 90, 90,110,100,110,110, 0, 0,255, 3}, { 90, 90, 0, 90, 90,180, 90, 90, 80,100, 80,120,255, 0, 0, 0}, { 90, 90, 0, 90, 90,180, 90, 90, 80,100, 80,120,255, 0, 0, 0} }, { // 2 Back aggresive { 90, 90, 0, 90, 90,180, 90, 90,100,100,100,120, 0,255, 0, 5}, {100, 70, 0, 90, 90,140, 90, 90,110, 90,110, 90, 0, 0,255, 3}, {100, 70, 0, 90, 90,160, 90, 90,110, 70,110, 80, 0, 0,255, 3}, { 90, 90, 0, 90, 90,180, 90, 90, 80, 60, 80, 80, 0,255, 0, 5}, { 80,110, 20, 90, 90,180, 90, 90, 70, 90, 70, 90, 0, 0,255, 3}, { 80,110, 0, 90, 90,180, 90, 90, 70,100, 70,110, 0, 0,255, 3}, { 90, 90, 0, 90, 90,180, 90, 90, 90, 90, 90, 90, 0, 0, 0, 0}, { 90, 90, 0, 90, 90,180, 90, 90, 90, 90, 90, 90, 0, 0, 0, 0} }, { // 3 Left { 90, 70, 0, 90, 90,180,110, 90, 95,100, 85,120, 0,255, 0, 5}, { 90,130, 0, 90, 90,180,110, 90,100, 90, 80, 90, 0, 0,255, 3}, { 90, 90, 0, 90, 90,180, 90, 90,100, 70, 80, 80, 0, 0, 0, 5}, { 90,130, 30, 70, 90,180,110, 90, 85, 60, 95, 70, 0, 0,255, 3}, { 90, 90, 0, 90, 90,180,130, 90, 80, 90,100, 90, 0, 0, 0, 5}, { 90, 90, 0, 90, 90,180, 90, 90, 80,100,100,130, 0, 0,255, 3}, { 90, 90, 0, 90, 90,180, 90, 90, 90, 90, 90, 90,255, 0, 0, 0}, { 90, 90, 0, 90, 90,180, 90, 90, 90, 90, 90, 90,255, 0, 0, 0} }, { // 4 Right { 90,110, 0, 70, 90,180, 90, 90, 95, 60, 85, 70, 0,255, 0, 5}, { 90, 50, 0, 70, 90,180, 90, 90,100, 90, 80, 90, 0, 0,255, 3}, { 90, 90, 0, 90, 90,180, 90, 90,100,100, 80,110, 0, 0, 0, 5}, { 90, 50, 0, 70, 90,150,110, 90, 85,110, 95,120, 0, 0,255, 3}, { 90, 90, 0, 50, 90,180, 90, 90, 80, 90,100, 90, 0, 0, 0, 5}, { 90, 90, 0, 90, 90,180, 90, 90, 80, 70,100, 80, 0, 0,255, 3}, { 90, 90, 0, 90, 90,180, 90, 90, 90, 90, 90, 90,255, 0, 0, 0}, { 90, 90, 0, 90, 90,180, 90, 90, 90, 90, 90, 90,255, 0, 0, 0} }, { // 5 RED, Left and Right, Hands Hands { 60,120, 0, 45, 90,180, 90, 90, 90, 80, 90, 80,255, 0,255, 5}, {120, 60, 0, 90, 90, 70,100, 90, 90, 90, 90, 90,255, 0, 0, 5}, {120, 60, 0, 90, 90, 70,100,110, 90, 90, 90, 90,255, 0, 0, 1}, {120, 60, 0, 90, 90, 70,100, 70, 90, 90, 90, 90,255, 0, 0, 1}, {120, 60, 0, 90, 90,180,135, 90, 90,100, 90,100,255, 0,255, 5}, { 60,120, 90, 80, 90,180, 90, 90, 90, 90, 90, 90,255, 0, 0, 5}, { 60,120, 90, 80, 70,180, 90, 90, 90, 90, 90, 90,255, 0, 0, 1}, { 60,120, 90, 80,110,180, 90, 90, 90, 90, 90, 90,255, 0, 0, 1} }, { // 6 Left and Right, hands up and down { 90, 45, 0, 90, 90,180, 90, 90,110, 90,110, 90, 0,255, 0, 10}, { 90, 45,160, 90, 90, 0, 90, 90,110, 90,110, 90, 0,255,255, 5}, { 90, 45, 0, 90, 90,180, 90, 90,110, 90,110, 90, 0,255,255, 5}, { 90, 45,160, 90, 90, 0, 90, 90,110, 90,110, 90, 0,255,255, 5}, { 90,135, 0, 90, 90,180, 90, 90, 70, 90, 70, 90, 0,255, 0, 10}, { 90,135,160, 90, 90, 0, 90, 90, 70, 90, 70, 90, 0,255,255, 5}, { 90,135, 0, 90, 90,180, 90, 90, 70, 90, 70, 90, 0,255,255, 5}, { 90,135,160, 90, 90, 0, 90, 90, 70, 90, 70, 90, 0,255,255, 5} }, { // 7 Ping, Hans open and close quickly { 50,130, 90, 70,110,180, 90, 90, 90, 90, 90, 90,204,102,255, 3}, { 50,130, 90, 70, 70,180, 90, 90, 90, 90, 90, 90,204,102,255, 2}, { 50,130, 90, 70,110,180, 90, 90, 90, 90, 90, 90,204,102,255, 2}, { 50,130, 90, 70, 70,180, 90, 90, 90, 90, 90, 90,204,102,255, 2}, { 50,130, 90, 70,110,180, 90, 90, 90, 90, 90, 90,204,102,255, 2}, { 50,130, 90, 70, 70,180, 90, 90, 90, 90, 90, 90,204,102,255, 2}, { 90, 90, 0, 90, 90,180, 90, 90, 90, 90, 90, 90,204,102,255, 3}, { 90, 90, 0, 90, 90,180, 90, 90, 90, 90, 90, 90,102, 0,153, 20} }, { // 8 Red Bye-Bye quickly { 90, 60, 0, 90, 90, 60, 50, 90, 90, 90, 90, 90,255, 0, 0, 3}, { 90, 60, 0, 90, 90, 60, 90, 90, 90, 90, 90, 90,255, 0, 0, 3}, { 90, 90, 0, 90, 90,180, 90, 90, 90, 90, 90, 90, 0, 0, 0, 0}, { 90, 90, 0, 90, 90,180, 90, 90, 90, 90, 90, 90, 0, 0, 0, 0}, { 90, 90, 0, 90, 90,180, 90, 90, 90, 90, 90, 90, 0, 0, 0, 0}, { 90, 90, 0, 90, 90,180, 90, 90, 90, 90, 90, 90, 0, 0, 0, 0}, { 90, 90, 0, 90, 90,180, 90, 90, 90, 90, 90, 90, 0, 0, 0, 0}, { 90, 90, 0, 90, 90,180, 90, 90, 90, 90, 90, 90, 0, 0, 0, 0} }, { // 9 Right and Left { 90, 90,150, 70,110, 0,100, 70, 90, 85, 90, 85,255,151,111, 3}, {160, 20,180,110,110, 0, 70, 70, 90, 85, 90, 85,255,151,111, 3}, { 10, 20, 40,130,110,130, 50, 70, 90, 85, 90, 85,255,151,111, 3}, { 10, 20, 40,130,110,130, 50, 70, 90, 85, 90, 85,255,151,111, 3}, { 20,160,180, 70,110, 0,100, 70, 90, 85, 90, 85,255,151,111, 10}, { 20,160, 40, 70,110,130,100, 70, 90, 85, 90, 85,255,151,111, 3}, {160,160, 40, 70,110,130,100, 70, 90, 85, 90, 85,255,151,111, 3}, { 90, 90,150, 70,110, 0,100, 70, 90, 85, 90, 85,255,151,111, 3} }, { // 10 Eight colored Illumination { 90, 90, 0,130, 90,180, 50, 90, 90, 90, 90, 90,255, 0, 0, 10}, { 90, 90, 0,130, 90,180, 50, 90, 90, 90, 90, 90, 0,255, 0, 10}, { 90, 90, 0,130, 90,180, 50, 90, 90, 90, 90, 90, 0, 0,255, 10}, { 90, 90, 0,130, 90,180, 50, 90, 90, 90, 90, 90,255,255, 0, 10}, { 90, 90, 0,130, 90,180, 50, 90, 90, 90, 90, 90, 0,255,255, 10}, { 90, 90, 0,130, 90,180, 50, 90, 90, 90, 90, 90,255, 0,255, 10}, { 90, 90, 0,130, 90,180, 50, 90, 90, 90, 90, 90,255,255,255, 10}, { 90, 90, 0,130, 90,180, 50, 90, 90, 90, 90, 90, 0, 0, 0, 10} } }; void setup() { servo[0].attach(10); // Head yaw servo[1].attach(11); // Waist yaw servo[2].attach(9); // R Sholder roll servo[3].attach(8); // R Sholder pitch servo[4].attach(7); // R Hand grip servo[5].attach(12); // L Sholder roll servo[6].attach(13); // L Sholder pitch servo[7].attach(14); // L Hand grip servo[8].attach(4); // R Foot yaw servo[9].attach(2); // R Foot pitch servo[10].attach(15); // L Foot yaw servo[11].attach(16); // L Foot pitch eyes[R] = 6; // Red LED of eyes eyes[G] = 5; // Green LED of eyes eyes[B] = 3; // Blue LED of eyes for( i = 0; i < MAXSN; i++) { targetAngle[i] = motion[0][0][i] << SHIFT; nowAngle[i] = targetAngle[i]; servo[i].write((nowAngle[i] >> SHIFT) + trim[i]); } for(i = 0; i < 3; i++) { targetBright[i] = 0 << SHIFT; nowBright[i] = targetBright[i]; analogWrite(eyes[i], nowBright[i] >> SHIFT); } Serial.begin(57600); delay(500); pinMode(POWER, OUTPUT); digitalWrite(POWER, HIGH); } void loop() { int buf = ERR; if(Serial.available()) { if(Serial.read() == '#') { while(!Serial.available()){} switch(Serial.read()) { case 'M': buf = readOneDigit(); if(buf != ERR){ motionNumber = buf; if(buf == 17) { motionNumber = 10; } mode = 'M'; digitalWrite(POWER, HIGH); Serial.print("#M"); Serial.print(motionNumber); } else { Serial.print("#EM"); } break; case 'P': buf = getPose(); if(buf != ERR) { mode = 'P'; digitalWrite(POWER, HIGH); Serial.print("#PT"); printThreeDigit(buf); } else { Serial.print("#EP"); } break; case 'Q': Serial.print("#Q"); if(mode == 'M') { Serial.print("M"); Serial.print(motionNumber); Serial.print("T"); buf = (endTime-millis()) /100; if(buf < 0) { buf = 0;} printThreeDigit(buf); } if(mode == 'P') { Serial.print("PT"); buf = (endTime-millis()) /100; if(buf < 0) { buf = 0;} printThreeDigit(buf); } break; case 'C': Serial.print("#C"); if(bufferTime > 0) { Serial.print("F"); } else { Serial.print("0"); } break; case 'X': Serial.print("#X"); digitalWrite(POWER, LOW); break; default: Serial.print("#E"); break; } } } if(endTime > millis()) { remainingTime = (endTime - millis()) / 10; for( i = 0; i < MAXSN; i++) { nowAngle[i] = targetAngle[i] - (deltaAngle[i] * remainingTime); servo[i].write((nowAngle[i] >> SHIFT) + trim[i]); } for( i = 0; i < 3; i++) { nowBright[i] = targetBright[i] - (deltaBright[i] * remainingTime); analogWrite(eyes[i], nowBright[i] >> SHIFT); } } else if(mode == 'M') { nextFrame(); } else if(mode == 'P') { if(bufferTime > 0){ nextPose(); } else if(endTime + 500 < millis()){ //digitalWrite(POWER, LOW); } } } //Motion Play void nextFrame() { frameNumber++; if(frameNumber >= MAXFN) { frameNumber = 0; } for(i = 0; i < MAXSN; i++) { bufferAngle[i] = motion[motionNumber][frameNumber][i]; } for( i = 0; i < 3; i++) { bufferBright[i] = motion[motionNumber][frameNumber][MAXSN+i]; } bufferTime = motion[motionNumber][frameNumber][TIME]; nextPose(); } //Make a pose int nextPose() { if(bufferTime > 0) { for(i = 0; i < MAXSN; i++) { targetAngle[i] = bufferAngle[i] << SHIFT; deltaAngle[i] = ((bufferAngle[i] << SHIFT) - nowAngle[i]) / (bufferTime * 10); } for( i = 0; i < 3; i++) { targetBright[i] = bufferBright[i] << SHIFT; deltaBright[i] = ((bufferBright[i] << SHIFT) - nowBright[i]) / (bufferTime * 10); } } else { for(i = 0; i < MAXSN; i++) { deltaAngle[i] = 0; } for(i = 0; i < 3; i++) { deltaBright[i] = 0; } } startTime = millis(); endTime = startTime + (bufferTime * 100); bufferTime = 0; } //get buffer values of the next pose from serial data int getPose() { int buf = 0; int value = 0; int maximum = 255; boolean readPose = true; if(bufferTime == 0) { //Initialize array to target angle for(i = 0; i < MAXSN; i++) { tempAngle[i] = bufferAngle[i]; } for( i = 0; i < 3; i++) { tempBright[i] = bufferBright[i]; } } else { buf = ERR; readPose = false; } //Read data while(readPose) { while(!Serial.available()) {} switch(Serial.read()) { case 'S': buf = readOneDigit(); if(buf != ERR) { value = buf *10; buf = readOneDigit(); if(buf != ERR) { value += buf; if(0 <= value && value < MAXSN) { while(!Serial.available()) {} if(Serial.read() == 'A') { maximum = 180; buf = readThreeDigit(maximum); if(buf != ERR) { tempAngle[value] = buf; } else { readPose = false; } } else { buf = ERR; readPose = false; } } else { buf = ERR; readPose = false; } } } break; case 'R': maximum = 255; buf = readThreeDigit(maximum); if(buf != ERR) { tempBright[R] = buf; } else { readPose = false; } break; case 'G': maximum = 255; buf = readThreeDigit(maximum); if(buf != ERR) { tempBright[G] = buf; } else { readPose = false; } break; case 'B': maximum = 255; buf = readThreeDigit(maximum); if(buf != ERR) { tempBright[B] = buf; } else { readPose = false; } break; case 'T': maximum = 255; buf = readThreeDigit(maximum); if(buf > 0) { bufferTime = buf; for(i = 0; i < MAXSN; i++){ bufferAngle[i] = tempAngle[i]; } for( i = 0; i < 3; i++) { bufferBright[i] = tempBright[i]; } } readPose = false; break; default: buf = ERR; readPose = false; break; } } return buf; } int printThreeDigit(int buf) { String s = String(buf); if(s.length() == 2){ Serial.print("0"); } else if (s.length() == 1) { Serial.print("00"); } Serial.print(s); } int digit; //Read ASCII Three-digit int readThreeDigit(int maximum) { int buf; buf = readOneDigit(); if(buf != ERR) { digit = buf * 100; buf = readOneDigit(); if(buf != ERR) { digit += buf * 10; buf = readOneDigit(); if(buf != ERR) { digit += buf; if(digit <= maximum) { buf = digit; } else { buf = ERR; } } } } return buf; } //Read ASCII One-digit int readOneDigit() { int buf; while(!Serial.available()) {} buf = Serial.read() - 48; if(buf < 0 || 9 < buf){ if(buf!=17){ buf = ERR; } } return buf; }
まとめ
少し根気が必要ですが、ラピロのArduinoファームウェアの動作パターンを変更するだけで、独自の動作に改造できます。例えば、左右に振り替えるときも、腕の動きが加わるだけですごく自然な動作に見えます。目指したのは赤い彗星並みに動作性能1.3倍。ラピロのサンプル動作は、少しぎこちないので、カッコいい動作をみんなで公開できるといいなーと思いました。
