Home > This page
ラズパイのデータを画面に表示する
ゴール設定(M5stackの画面にデータを表示する)
ラズパイ(Raspberry Pi)で取得した温度データ、距離センサデータなどをM5stackの画面に表示したい。M5stackにはWifi通信機能が付いているが、今回のデータ通信は、あえてシリアル通信とする。M5stackのボタンを押してテキストでコマンドをラズパイに送信すると、ラズパイからM5stackに数値データが返信されてくるというスクリプトを書く。
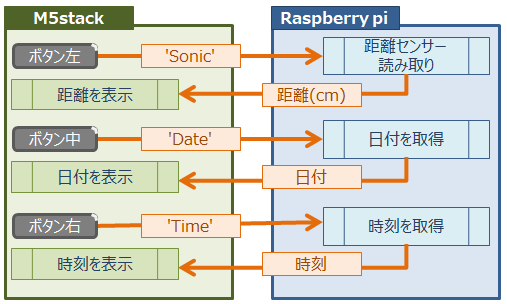
事前準備(データ通信のコマンドを決める)
M5stackの画面に表示するデータをラズパイから送信したい。M5stackのボタン3つに音波距離センサーの'Sonic'や'Date'、'Time'というテキストを送信するスクリプトを割り当てする。ラズパイはそれらのテキストを受信したら、対応するスクリプトを実行して結果をM5stackへ送信する。M5stackはループ処理でデータ受信を調べ、ラズパイはデータ受信を割り込み処理で受け付ける。
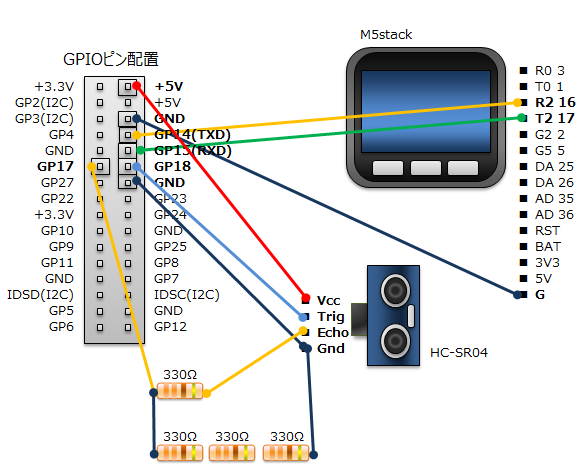
配線図
準備(ラズパイ側のスクリプト)
最初に[ttyAMA0]を無効にしておくこと。
sudo systemctl status serial-getty@ttyAMA0.service sudo systemctl stop serial-getty@ttyAMA0.service sudo systemctl disable serial-getty@ttyAMA0.service
pythonで書いたラズパイ側のスクリプト。
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import serial
import threading
import datetime
import time
import wiringpi as pi
serCom = serial.Serial('/dev/ttyAMA0', 115200, timeout = 1 )
class serialRead():
def __init__(self):
self.threadRead = threading.Thread( target = self.target )
self.threadRead.start()
def target(self):
flag=True
while flag:
if( serCom.inWaiting() > 0 ):
strC = serCom.read( serCom.inWaiting() )
print( "[%s]" % strC )
if( strC == "Sonic"):
num = 0
while num < 10:
num = num + 1
strDistance = mesure()
serCom.write( strDistance )
print( strDistance )
time.sleep(1.0)
if( strC == "Date" ):
objDate = datetime.date.today()
strDate = objDate.strftime("%Y/%m/%d")
serCom.write(strDate)
print(strDate)
if( strC == "Time"):
objTime = datetime.datetime.now()
strTime = objTime.strftime("%H:%M:%S")
serCom.write(strTime)
print(strTime)
def quit(self):
flag=False
def main():
print( "Start reading..." , serCom.portstr )
while True:
try:
strA = raw_input("send: ")
serCom.write( strA )
print( "[%s] sent" % strA )
if( strA == "exit" ):
serCom.close()
threadRead.quit()
exit()
except:
serCom.close()
threadRead.quit()
exit()
def sonicInit():
global TRIG_PIN
global ECHO_PIN
global pi
TRIG_PIN = 18
ECHO_PIN = 17
pi.wiringPiSetupGpio()
pi.pinMode( TRIG_PIN, pi.OUTPUT )
pi.pinMode( ECHO_PIN, pi.INPUT )
pi.digitalWrite( TRIG_PIN, pi.LOW )
def mesure():
pi.digitalWrite( TRIG_PIN, pi.HIGH )
time.sleep(0.00001)
pi.digitalWrite( TRIG_PIN, pi.LOW )
while ( pi.digitalRead( ECHO_PIN ) == pi.LOW ):
sigoff = time.time()
while ( pi.digitalRead( ECHO_PIN ) == 1 ):
sigon = time.time()
strTemp = str( round((( sigon - sigoff ) * 34000) / 2, 5 )) + "cm"
time.sleep(1.0)
return ( strTemp )
if __name__ == '__main__':
sonicInit()
threadRead = serialRead()
main()
準備(M5stackのスケッチ)
Arduino IDEでコンパイルしてM5stackに書き込む。
#include <M5Stack.h>
HardwareSerial Serial2(2);
void setup() {
M5.begin();
// Serial2.begin(unsigned long baud, uint32_t config, int8_t rxPin, int8_t txPin, bool invert)
Serial2.begin(115200, SERIAL_8N1, 16, 17);
M5.Lcd.setTextColor(TFT_WHITE,TFT_BLACK);
M5.Lcd.setTextSize(2);
M5.Lcd.setCursor(0, 0, 4);
M5.Lcd.println("M5 UART start...(^^)/~~~");
M5.Lcd.setTextColor(RED);
M5.Lcd.setCursor(0, 200, 2);
M5.Lcd.println("
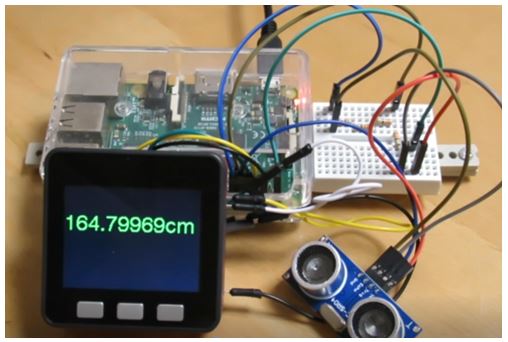
実験(ラズパイとM5stackを起動する)
M5stackのボタンを押したらテキストコマンドが送信される。ラズパイがコマンドに応じた処理結果を返信してM5stack画面に表示する。
まとめ(ラズパイからデータを送信して、M5stackの画面に表示した)
ラズパイの'/dev/ttyAMA0'デバイスを無効にしないとシリアル通信が出来ないことを知らず1ヶ月近く悩んだ。ついにはラズパイをもう1台買ってきて、ラズパイ対ラズパイのシリアル通信で検証してみてttyAMA0デバイスがデフォルトで有効になっていることが分かり、これを無効化したらシリアル通信が出来る事をようやく確認できた。今回はテキストを送受信するスクリプトの検証が出来たので、次は本当にやりたかったことに着手する。
