micro:bit でサーボモーターを操作
マイクロビットの端子P0, P1, P2が3つある。3つの端子で3個のサーボモーター角度を操作する
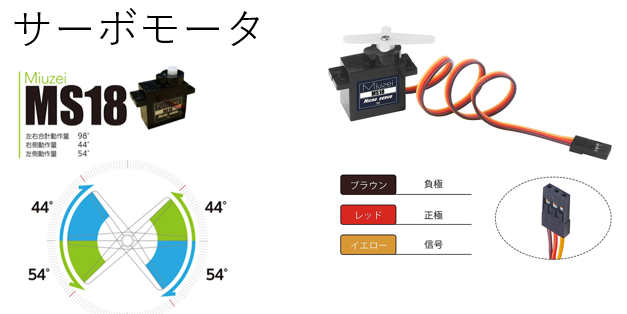
サーボモーターは、MS18をつかう。最大動作角度は98°(プログラムで120°まで動作しそうだけど、データシートも無く不明。購入元WEBサイトには200°とか180°とか記載されてて更に不明)
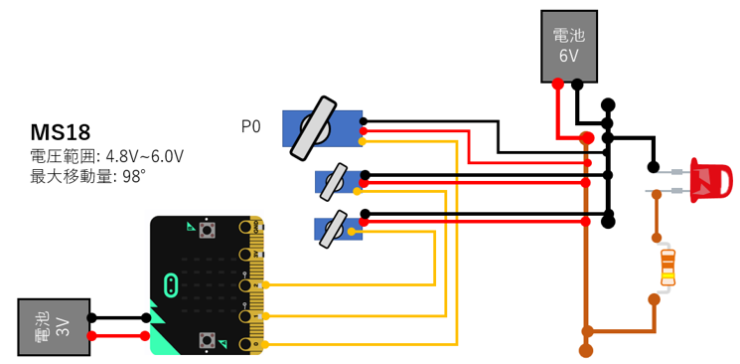
配線図
1.サーボモーター用の電源は乾電池からとる(マイクロビットの電源3Vをモーターで利用するとマイクロビットが再起動するなど誤動作します)
2.サーボモーター用の角度信号はマイクロビットのP0、P1、P2から接続する。
3.マイクロビット本体の電源は乾電池もしくはPCのUSBケーブルを接続する。
4.LEDは無くてもよいが、乾電池の消し忘れ(OFF)を防ぐためにもあると便利。
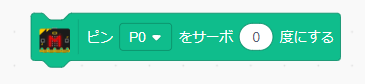
プログラミングは[microbit more]で。[Scratch]にはサーボモーターを操作するコードがありません。
コメント欄を読み込み中