WEBアプリを公開したら、世界中のインターネット利用者が閲覧できる状態になっています。自分だけのデータを登録したら、IDとパスワードで自分のデータを保護したいですよね。ここでは、3つのユーザー認証方式を学びます。 「ユー […]
ユーザー認証(ID,パスワードでログイン)の学習

WEBアプリを公開したら、世界中のインターネット利用者が閲覧できる状態になっています。自分だけのデータを登録したら、IDとパスワードで自分のデータを保護したいですよね。ここでは、3つのユーザー認証方式を学びます。 「ユー […]

ラズパイカメラを使って、月の動きや雲の変化など、長時間の変化を短時間ムービーで観察しよう 研究手順 タイムラプスとは何か 例えば1分間毎にカメラ撮影して、その画像をつなぎ合わせると短時間のビデオで長時間の変化を観察できる […]
レトロアーケードゲームのピンボールに挑戦します。ボールの動きはとても難しいので、先に作ってあるScratch素材からリミックスします。■リミックス用素材<https://scratch.mit.edu/projects/ […]
Raspberry Pi でのコード開発を想定しています。ラズパイにSSH接続できたらPythonコードを作成してください。 目次 1. ラズパイのCPU温度を表示する LED点灯で学習したように、PCのハードウェア情報 […]
SSH接続できたらPythonコードを作成してください。 目次 1. 復習 ▼Linuxのコマンド(第二章を参照)https://funnygeekjp.com/mnt/3188/ ▼pythonディレクトリを作る。py […]
インフルエンザが流行しています。皆さんは、元気に体調維持できていますか。本日はウィルスを撃退しつつ、風邪をひかないよう注意しましょう。リミックスするScratch素材は、こちらの「青梅スタジオ」で共有しています。 本日の […]
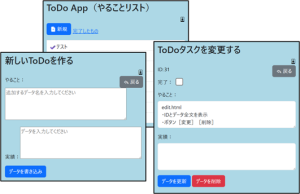
プログラミング講座では、python, JavaScript, MySQL, HTML/CSSを使って本当に使えるアプリを開発します。本書では試しに作ったアプリの使い方を紹介します。 Simple ToDo アプリの使い […]

USBゲームパッドが接続されたノートPC側から、ラズパイに「レバーやボタン操作」のコマンドを送信する。また、ラズパイ側から、ノートPCに「レバーやボタン操作」を受信できたことを折り返し返信する。前回は片方向通信だったが、 […]
ファイルを機能別に分割して、シンプルで使いやすいUIに改造する。見た目は、Bootstrap を使って、イマドキなデザインにする。 この章は宿題。自由に好きなUIにカスタマイズしてください。 […]
CoderDojo青梅 午後の部では、Python言語でコードを記述してラズタンクを操作します。本書は、Python言語を遊びながら体験するものです。 第一章.サーバーにSSH接続する PythonはWindows PC […]
JavaScriptで作ったAPIアプリを、Node.jsで動かします。Node.jsは「JavaScriptをサーバーサイドで動かすための実行環境」です。 node.js のインストール まだインストールしていない場合 […]
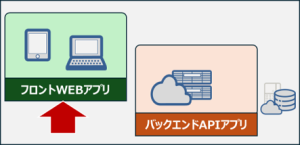
PCやスマホの画面にデータを表示したり、データを追加したりできるアプリをHTMLとCSSで記述します7-1. WEBページの制作(HTML)7-2. フロントWEBアプリのJavaScriptコード7-3. バックエンド […]
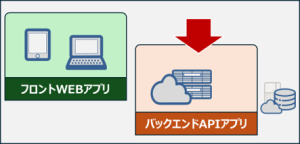
6-1. HTTPリクエストを検査する curl コマンド6-2. DB接続クレデンシャル6-3. バックエンドAPIアプリの設計6-4. connectDatabase()関数6-5. closeDatabase(db […]
5-1. ほぼカラのHTML5-2. FormとCSSデザイン5-3. JavaScriptを読み解く5-4. Bootstrap でデザインを効率化する5-5. ライブラリ[p5.js]でキャンバスに絵を描画5-6. […]
4-1. WEB&アプリサーバーの設計4-2. Nginx 初期セットアップ4-3. SSLサーバー証明書の取得と自動更新4-4. Node.js サーバーの初期設定4-5. はじめてのAPIプログラミング4-6 […]

3-1. 保守ネットワーク経路3-2. MySQLのインストール3-3. 新規DBユーザーの作成3-4. SQLコマンドを練習3-5. MySQLプロセスの設定変更3-6. (参考)DBサーバーと暗号化通信する場合3-7 […]

2-1. Linuxユーザー追加とカギ設定🔑2-2. Linuxサーバーのホスト名変更2-3. 新しいLinuxユーザーでログイン2-4. ドメイン取得とDNS2-5. VScodeを使ってSSH接続 この章では、Lin […]
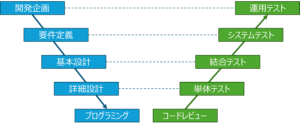
1-1. どんなアプリを開発するのか1-2. アプリ開発プロセス1-3. 開発企画(どんなアプリなのか)1-4. 要件定義(機能を決める)1-5. 基本設計1-6. 詳細設計1-7. プログラミング 中高生を対象としたプ […]

PCブラウザに接続したUSBゲームパッドを操作する。ラズパイ側は python の websocket で待ち受け・受信する。 [ゲームパッド]ー[PCブラウザ]ー[Wi-Fi]ー[ラズパイ websocket] その1 […]
Node-RED フローを準備する [USBゲームパッド]→[PCブラウザ]→ ネットワーク →[Node-RED] 新しいフローを開き、[websocket]と[debug]の2つのノードを配置します。 [websoc […]