あっというまに大会になり、一瞬で終わりましたね。今年からこのように結果を書き込んで行けたらなと思います。 1.競技内容 競技内容は の3つです。くわしいルールやコースはhttps://funnygeekjp.com/mn […]
続きを読む… from コーダー道場 青梅カップ2024結果
あっというまに大会になり、一瞬で終わりましたね。今年からこのように結果を書き込んで行けたらなと思います。 1.競技内容 競技内容は の3つです。くわしいルールやコースはhttps://funnygeekjp.com/mn […]
続きを読む… from コーダー道場 青梅カップ2024結果

あっというまの1年間でした。Pythonコマンドとカクカク映像での運転を改善するため、MJPGストリーミングと見た目のかっこいいWEBダッシュボードを開発した1年間です。この成果を2025年3月9日(日)午後の部で発表し […]
CoderDojo青梅 午後の部ではラズベリーパイ&電子工作をテーマに、プログラミングを遊んで学習しています。2022年から子どもたちの意見を取り入れつつ、ラズタンクを進化させて今年は4年目、4期生を募集することになりま […]

API(アプリケーション プログラミング インターフェース)は、あるプログラムから別のプログラムの機能を使うしくみのこと。ラズタンクでは、メインとなるリモート操作パネルをフロントエンドの「 HTML + JavaScri […]
メンターの「いわちゃん」からラズパイ・ピコ「Raspberry Pi Pico W」を頂きました。何ができるのか試したので報告です。ピコぴこってなんだかカワイイ名称ですね。 ラズパイ・ピコとは? 超小型のラズパイです。今 […]
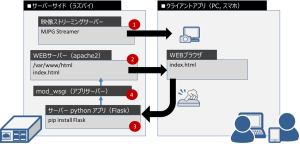
PCでキー操作して、ラズパイでpythonコードを実行する STEP1. キー操作画面はWEBサーバー(2)で配信して、同じネットワークにあるPCがキー操作をする。STEP2. キー操作に対応するpythonアプリ(3) […]
続きを読む… from WEBアプリでラズパイ操作(Flask, Python)
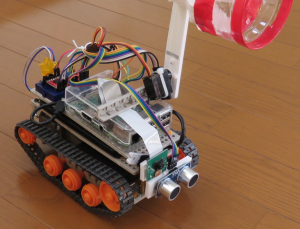
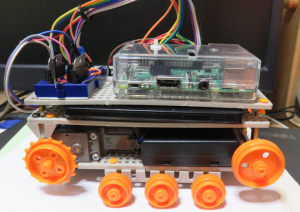
ラズベリーパイ(Raspberry Pi)とキャタピラ駆動のトラックホイール車を組み合わせて遠隔操作する通称ラズタンクを制作します。ここでは要素毎・機能毎に投稿したニンジャ用巻物を並べます。つまり目次としてまとめたもので […]
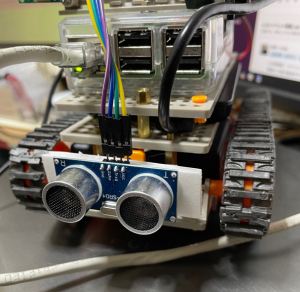
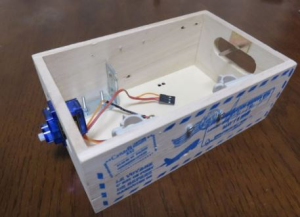
ラズタンクをリモート画面で遠隔操作すると目の前の障害物までの距離感覚がつかめないことがある。そこで、車体前面に取り付けた超音波センサーで障害物までの距離を計測して、5~10cm手前で強制停止するしかけをつくる。 配線図の […]
今使っているモータードライバー(TA7291P)は Hブリッジ での電圧降下が2回あるらしくそれぞれ 1V (ボルト)ずつ降下するので合計2Vも電圧降下してしまうとのこと。単三乾電池4本(6V)ですが 4V になる。ん、 […]

開発者のためのプラットフォーム GitHubGitHubは、複数のプログラマーが共同でコードを開発する場所。置き場所をリポジトリという。 CoderDojo青梅のラズタンク用プログラム集は、GitHubから最新のコードを […]

大会概要 完成したラズタンク全9台で、コースを走破してゴールを目指す。競技は3つ。保護者のみ観客OK。学校と違って、競争もします。 開催日 12月10日(日)午後 大会前の準備 12月の大会めざして、9月~11月は試運転 […]
続きを読む… from CoderDojo青梅カップ 2023大会

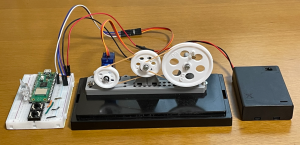
数秒毎・毎分など一定間隔もしくは決まった時刻にコードを実行する cron という機能を使って、一定間隔でカメラ撮影します。 例えば、このロボットは3秒間に1回ずつ連続写真を撮影したもの。みんなは何を撮影してみたいですか? […]
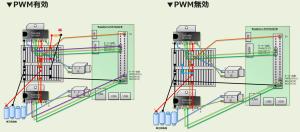
PWMによるスピード調節がうまく動かないので今回は一定速度で再設計する。ラズタンクの前進速度がハイスピード、後進がスローにしたかったので、PWM(パルス信号)を使う方式を検討した。前進100%スピード、後進50%スローと […]
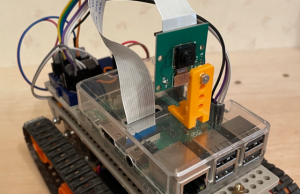
ラズパイカメラ・モジュール(レガシーカメラ) 【注意】※最新のラズパイOSでは基盤に実装するカメラが非対応と悲しい。「Raspberry Pi OS (Legacy)」をインストールして使います。 本日のメニュー 開発者 […]

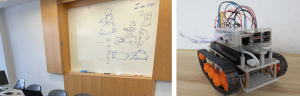
ラズベリーパイを搭載したトラックベルト駆動(キャタピラ)の走行車を組み立てした。次はメディア系の機能を搭載する。 本日のメニュー 準備[PCでラズパイにリモートデスクトップ接続] Windows の DOS でラズパイか […]

目次(ラピロに実装した機能) ラズパイが喋る(音声合成) 使い方:テキスト文字をイヤホンスピーカーで読み上げます。Linuxでシェルコマンドを実行します(pythonではありません)。 #実行結果 記事:<http […]

目次 python コードエディタ pythonプログラミングをWindowsパソコンで練習するには Raspberry Pi Coder Editor がおススメですhttps://editor.raspberrypi […]
続きを読む… from python コードサンプル(Scratchユーザ向け)
Pythonコードを実行前に、「キーボード入力を読み取るライブラリreadchar」をインストールします 以下がラズタンクのpythonコードです。例えば[$ sudo nano tank.py]などで新しいファイルを作 […]

ラズベリーパイ財団が誰でも使えるコードエディタをお試し公開しました。Scratchでプログラミングが得意な中級以上のひとはテキスト入力でプログラミングするコードエディタに挑戦しますか? コードエディタはChromeやEd […]
続きを読む… from Scratchの次はPython(パイソン)だ
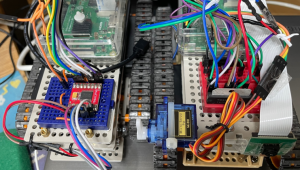
GPIOにサーボモーターを繋いで、何か動かす サーボモータは[+5V][GND][GPIO出力]の3本をラズパイに接続する サーボモータを操作する python プログラム 実行方法1.角度を指定するとき 実行方法2.秒 […]