AボタンとBボタンでサーボモーターを操作したい。という質問を頂きましたのでコードを紹介します。サーボモーターは0°から180°まで動くとします。最初は90°の位置、つまり真ん中にいます。Aボタンを押したら、180°この場
micro:bit でサーボモーターを動かす
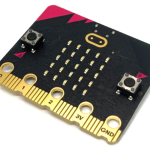
AボタンとBボタンでサーボモーターを操作したい。という質問を頂きましたのでコードを紹介します。サーボモーターは0°から180°まで動くとします。最初は90°の位置、つまり真ん中にいます。Aボタンを押したら、180°この場

2025年度のラズタンク開発者に、四期生3名の参加が決定しました!部品調達と加工の下ごしらえも着々と進んでいます。お楽しみに! 部品調達 タミヤの部品「ユニバーサルプレート、ダブルギヤボックス」が生産終了で困っていました
あっというまに大会になり、一瞬で終わりましたね。今年からこのように結果を書き込んで行けたらなと思います。 1.競技内容 競技内容は の3つです。くわしいルールやコースはhttps://funnygeekjp.com/mn

あっというまの1年間でした。Pythonコマンドとカクカク映像での運転を改善するため、MJPGストリーミングと見た目のかっこいいWEBダッシュボードを開発した1年間です。この成果を2025年3月9日(日)午後の部で発表し
CoderDojo青梅 午後の部ではラズベリーパイ&電子工作をテーマに、プログラミングを遊んで学習しています。2022年から子どもたちの意見を取り入れつつ、ラズタンクを進化させて今年は4年目、4期生を募集することになりま

ラズタンクに赤外線障害物センサー2個を追加して、障害物を回避しながら自動走行する 追加した部品(IR赤外線障害物回避センサー) ラズタンク(ここまでの完成の姿) センサーの感度調整 このセンサーは障害物までの距離を変更(

Node-REDのUIダッシュボードにキーボード操作できるAPIを追加する。ラズタンクのカメラ映像を見ながら[W][A][S][D]キーボードで前後左右に運転する。これならブラインドタッチでラズタンクを操作できるので競技

音楽を鳴らそう!!onラズベリーパイ

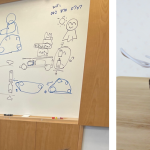
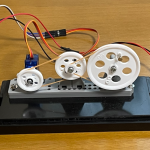
レジンという光に当てると固まる液体がある、と教えてもらったのでやってみた。材料は、UV-LEDレジン星の雫ハードタイプ30g透明が1,500円、そしてシリコンモールド(型)。名前がUV-LEDだけど、電気で点灯するLED
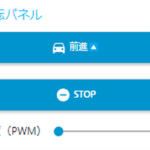
ラズタンク動作(前進のみ) Node-Redフローを設定する ラズタンク動作(停止する) Node-Redフローを設定する 動作テスト WEBブラウザのURL[http://razpi10.local:1880/ui]を
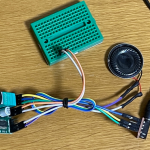
リモートで運転するラズタンク。遠隔地で救助を待つ被災者に、ラズタンクがやさしく話しかける。 配線図 ボリュームコントロールは、電源にもなっている様子(カチッというまで左に回すとOFF、カチッと右に回すと音量が大きくなる)

JavaScript の復習 まずは JavaScript を動かす基本を確認しましょう。ラズパイでもWindowsでも構わないので、どこかのフォルダに2つのファイル(test.html と test.js)を作ります。
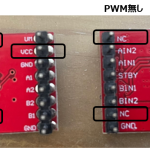
(モータードライバーが違う!?) 5月のCoderDojo青梅で皆に配ったモータードライバーにPWM信号がありませんでした!誤って注文してしまったようです。PWMでのスピード制御ができないので、すいらぼさんのフロー「No
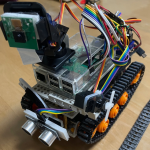
メンター「かの」のラズタンクには様々な改造が施されています。改造に使ったパーツを紹介します。 二軸カメラ土台 SG90サーボモーターを2個つなげて、ラズパイカメラを左右・上下に回転させる土台です。ガンダムに登場するザクや
どうも。けいたろうです。 今回は新式ICでの前進後進のプログラムを投稿します。 早速、プログラムを公開します。 重要!上のプログラムは0と1が入れ替わっているので注意してください⚠️(ごめんなさい) これが前進と後進のプ

ラズタンクは2年間かけて改造を繰り返してきたので、「トラック&ホイール」のトラックベルト部分(キャタピラーとか呼んでいるやつ)が緩んできた気がする。その場で左右回転をするとトラックベルトが外れやすい。 ゴム素材なので継ぎ

ラズパイのGPIOに接続したサーボモーター(SG90)をNode-REDのダッシュボードで操作します。 サーボモーターをGPIOに接続します。 Node-RED開発ツールにアクセスします。 Node-RED[ダッシュボー

これは便利だ。次の大会では宝探しで優勝しそう ダッシュボード 機能が充実してきた。今日はついにラズパイを上下・左右に移動させるサーボモーター土台が届いた。これでラズタンクの左右回転せずにリモート映像を確認できる。ラズタン
メンターの「いわちゃん」からラズパイ・ピコ「Raspberry Pi Pico W」を頂きました。何ができるのか試したので報告です。ピコぴこってなんだかカワイイ名称ですね。 ラズパイ・ピコとは? 超小型のラズパイです。今

どうも久しぶりの投稿です。今回はNode-redという物を利用してwebからラズパイに付いているカメラを見る方法です。 完成形 まずは完成形です。 作り方 早速作り方です。まずはリモートデスクトップを使ってラズパイと繋げ