今使っているモータードライバー(TA7291P)は Hブリッジ での電圧降下が2回あるらしくそれぞれ 1V (ボルト)ずつ降下するので合計2Vも電圧降下してしまうとのこと。単三乾電池4本(6V)ですが 4V になる。ん、4Vあればモーターは回転するはず。やや疑問はありつつも、ラズタンクがだんだん遅くなっていき、ついにぎこちない速度、たまに回転のときにキャタピラが回らなくなったりする。
モータードライバーを交換してみる
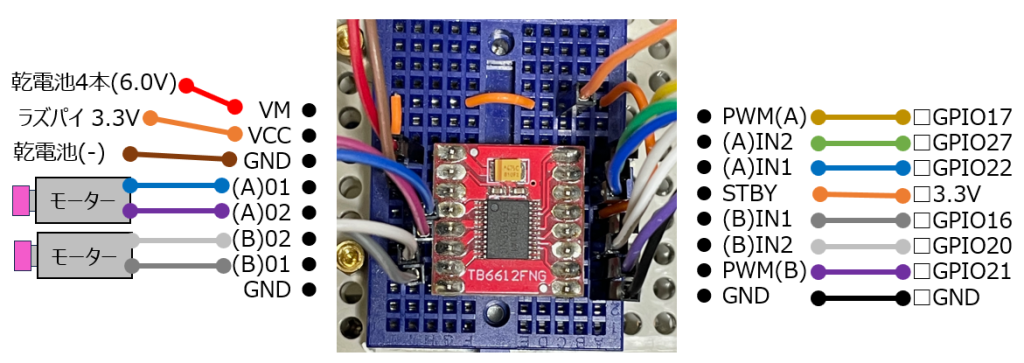
そこで、モータードライバー(TB6612FNG)に交換してみた。
画像右の TA7291P はバイポーラトランジスタ駆動で電圧降下が大きく、
画像左の TB6612FNG はFET(電界効果トランジスタ)駆動で電圧降下が小さいとのこと。
TA7291Pはモータドライバーを2個使っていたが、TB6621FNGはIC1個の中にモータドライバーが2個実装されている。
部品が減ったし、ブレッドボードに繋ぐ配線も減って見た目もスッキリしました。PWMでの速度変更もできたので、スラローム走行が可能になりました。
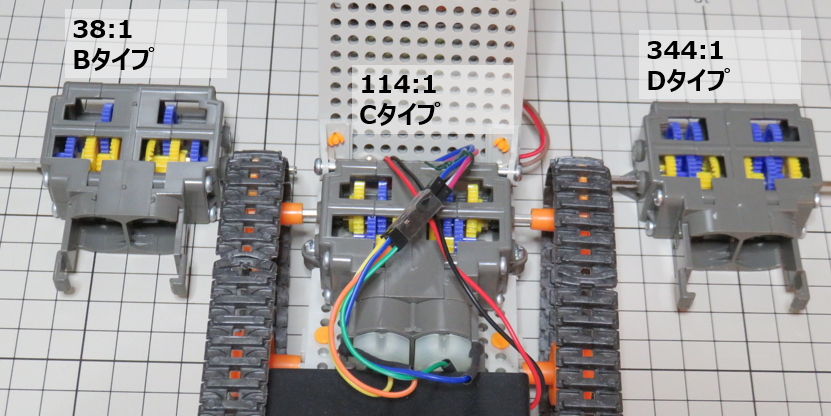
TB6612FNG に交換したついでに、ダブルギアボックスは一番低速だけどトルクの大きな(Dタイプ)で試しました。前後移動は遅いけれど、回転は機敏です。
タミヤ ダブルギアボックスのギア比を変える
ラズタンクは重たい。測った図ったことないけれど, 608グラムもある。スピードよりもトルク重視でCタイプを選んだ。
でも高速ラズタンクも憧れる。変えてみた。
説明は不要かな、動画で確認してみましょう。
障害物競走のためにトライアル
CoderDojo青梅2023カップの障害物競走はアンパン食い競争ではなく、ピンポン玉運びです。
ピンポン玉をラズタンクで押し出すと、どこに転がっていくのかわからないので、なるべく上手に運びたい。
よしピンポン玉を持ち上げちゃえ。と思った。
ピンポン玉、運び。絶対にこのポジションにラズタンクを停車できないだろう無理ゲー。
プログラミングで改造
すばやくラズタンクの機能を呼び出すためにメニューを追加してみた。
下記はコードの一部です。全編は Github の menu.py で確認できます。
try:
while RUNNING:
print (u'--- 機能一覧 ---')
print (u'[c] ラズパイカメラ画像を表示 ※リモートデスクトップ必須, video.py')
print (u'[d] ラズタンク・キー操作[TB6612FNG], tank4_c-type.py')
print (u'[e] ラズタンク・キー操作[ノーマルTA7721P], tank.py')
print (u'[f] サーボモーター[GPIO14], servo2.py')
print (u'[0] End')
ラズタンクの参考プログラムは Github にて。
あと2ヶ月、みんな、がんばるぞー。
面白いピンポン玉の取り方ですね!