2025年度のラズタンク開発者に、四期生3名の参加が決定しました!
部品調達と加工の下ごしらえも着々と進んでいます。お楽しみに!
部品調達
タミヤの部品「ユニバーサルプレート、ダブルギヤボックス」が生産終了で困っていましたが、カズシパパも手伝っていただき代替品のツインモーターを選択しました。ユニバーサルプレートはオンラインショッピングで在庫限りの販売を見つけてぎりぎり必要数を入荷しました。Raspberry Pi 3B+も生産が終了しており在庫限りの価格も8倍くらい高額になっていますが、なんとCoderDojo名護がラズパイ3B+を寄贈してくれました。

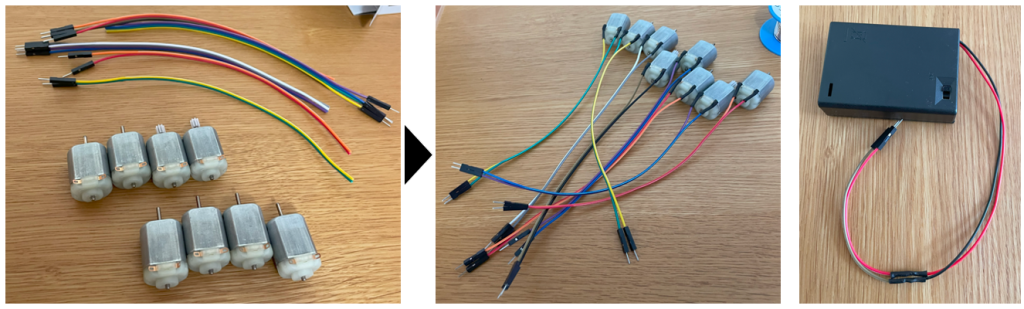
組立ステップ1. 準備(ハンダ付け)
今年はプログラミングに注力したいので、ハンダ付けは省略します。興味ある人には別の電子工作で体験会を予定しますのでメンターに申し込みください。
モーター2個と電池ボックス1個にワイヤーをハンダ付けして収縮チューブでむき出しの金属部分を保護します。
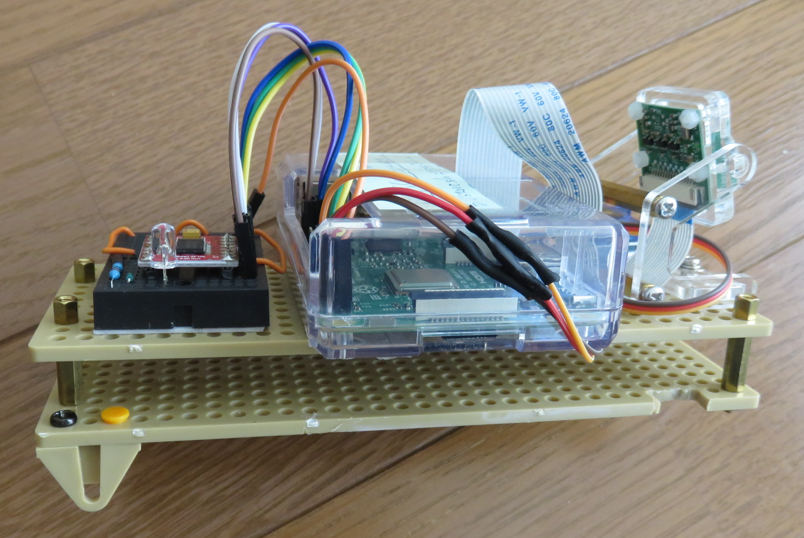
組立ステップ2.車体構築
当日持参する実機を見て参考にします。自分の好きな方法で組み立てます。同じじゃなくていいです。
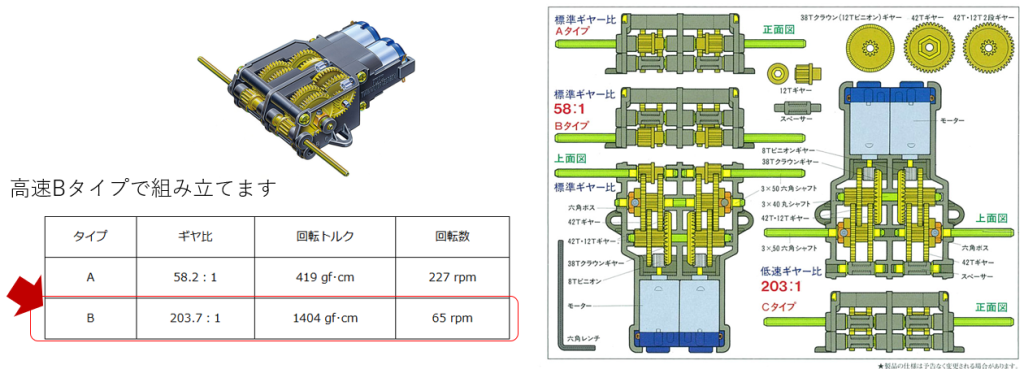
- ツインモーターの組み立て(高速ギヤはタイプB)(低速ギヤはタイプC)
- 車体の組み立て(キャタピラ以外)
- キャタピラ組立(連結式クローラーは時間がかかるので自宅で作ってください。ゴム部分は接着剤で固定を推奨)
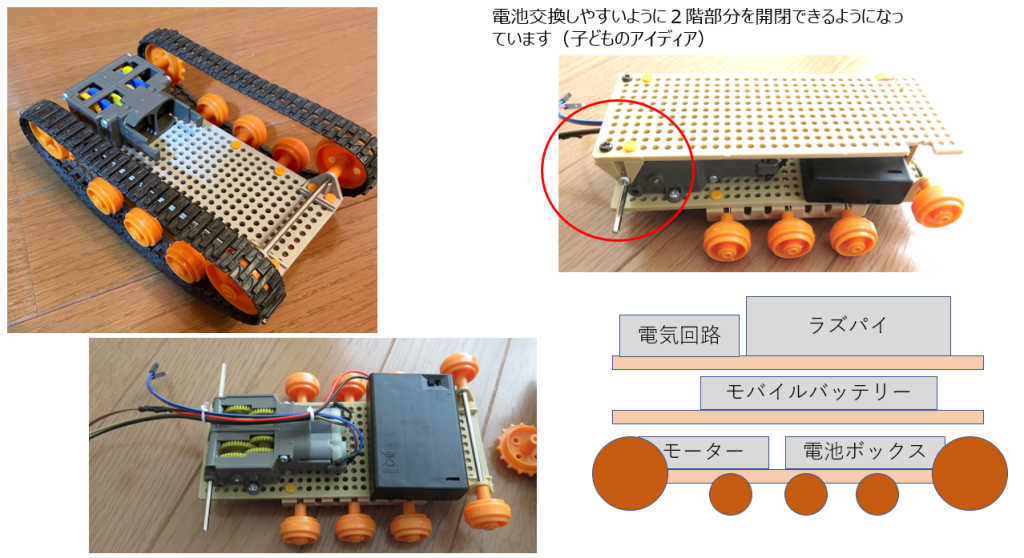
最終形を想像しながら3階を配置します。開閉できる2~3階部分です。
ツインモーターの組み立て
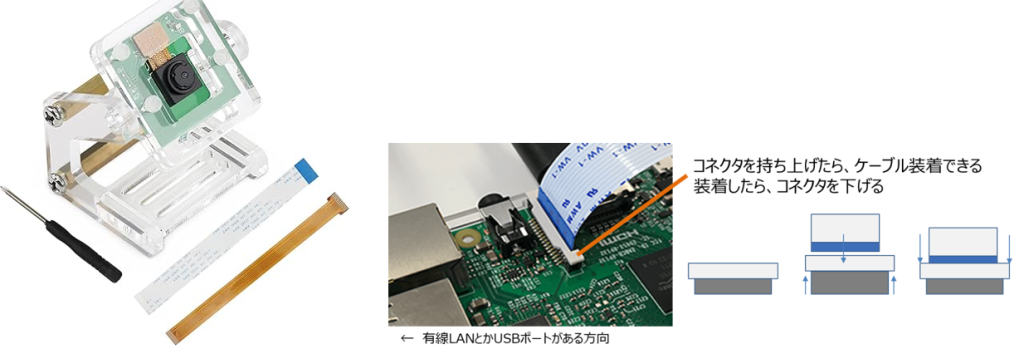
ラズパイカメラの組み立て
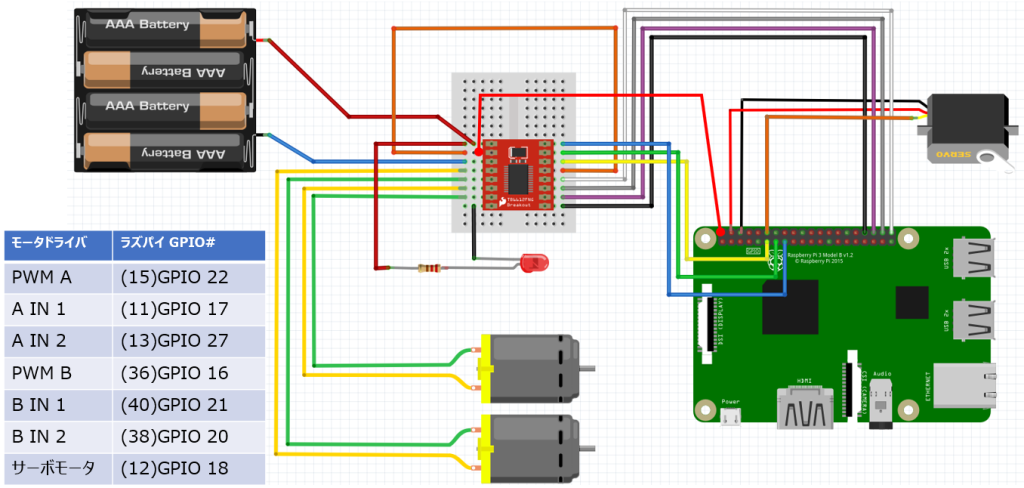
組立ステップ3.電子回路
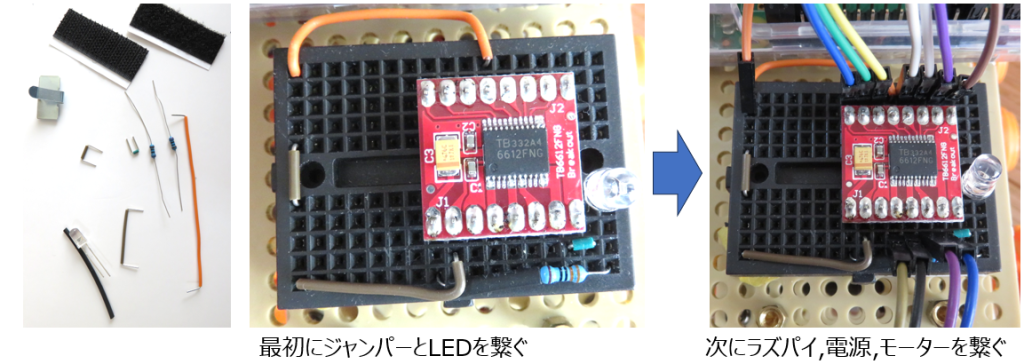
歴代の開発者はケーブルの配線ミスが原因でプログラムが正しく動作せず、原因分析に時間がかかって、大幅な時間ロスをしています。
先駆者の失敗経験を活かして、今年は下記ステップで配線し、できるだけ図面と同じケーブルの色にあわせてみてください。
組立ステップ4.動作確認
モーターがスムーズに回転することを検査する
組み立て会はここまで。次回は、ラズパイにログインしてPythonで運転しましょう🤗
pythonで運転する
本日の開発ステップ
1. VS code でラズパイにSSH接続
2. Pythonコードで前進&ストップを実行
3. キーボード[w][x]キーで前進&ストップ操作
4. 前後左右にキーボードで操作する
pythonコードひな形
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import RPi.GPIO as GPIO
# 初期設定(定数は大文字で書く)
# 初期設定(ラズパイのGPIO)
# 初期設定(PWM)
# Speed
# 前進
# ストップ
# 終了
# メインルーチン($ python3 tank_basic.py なら'__main__'がセットされる)
if __name__ == '__main__':
自宅Wi-Fiに接続するためのコマンドライン
ノートPCとラズパイがWi-Fiで繋がっていない時は、有線LANケーブルで接続して、SSH接続します。
$ ssh pi@razpi**

コマンドラインからWi-Fi設定するには、下記ファイルに新しい network ブロックを追加して Wi-FiのSSIDとシークレットキーを書きます。
暗号方式[key_mgmt]は自宅Wi-Fiの種類で変更が必要かもしれません。[WPA-PSK]で繋がらない場合は他[WPA-EAP][ WPA3-SAE][NONE][WPA/WPA2-PSK]を試してください。
$ sudo nano /etc/wpa_supplicant/wpa_supplicant.conf
ctrl_interface=DIR=/var/run/wpa_supplicant GROUP=netdev
update_config=1
country=JP
network={
ssid="アクセスポイント名"
psk="シークレットキー"
key_mgmt=WPA-PSK
}
network={
ssid="TP-Link_****"
psk="70****19"
key_mgmt=WPA-PSK
}ラズパイ専用カメラを使う
CoderDojo青梅のOS(マイクロSDカード)には、映像ストリーミングのインストールと初期設定が完了しているのでたった3つの手順でカメラ映像を利用できます。
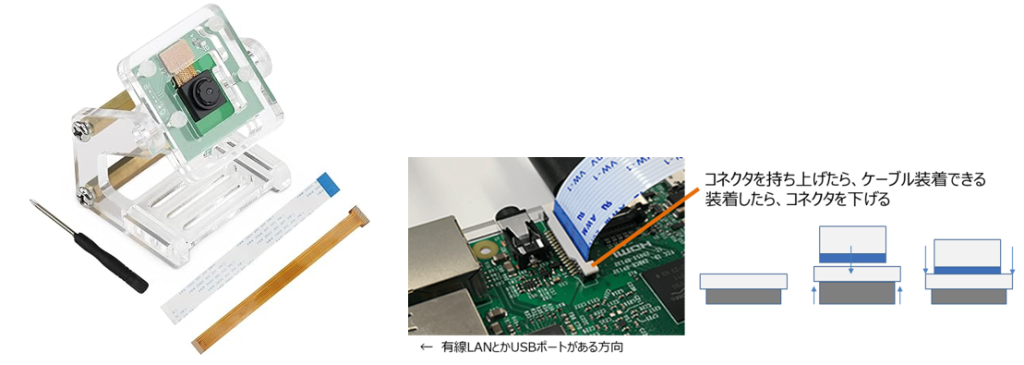
1. ラズパイ専用カメラを接続する
2. 映像ストリーミングアプリを起動する
3. WEBブラウザで映像ストリーミングのURLにアクセスする
ラズパイ専用カメラを接続する
映像ストリーミングアプリを起動する
Windowsのターミナル(コマンドプロンプト)を使ってください。VScodeのターミナルだと[Ctrl]+[C]を押しても正常終了しません。ディレクトリ「/home/pi/python/mjpg-streamer/mjpg-streamer-experimental」に、アプリを起動するスクリプト「start.sh」があります。ディレクトリを移動して、スクリプトを実行します。
> ssh pi@razpi**
$ cd ~/python/mjpg-streamer/mjpg-streamer-experimental
$ ./start.sh下記画面が表示されたら起動成功

WEBブラウザで映像ストリーミングのURLにアクセスする
ブラウザURLは[http://razpi**.local:8080]です。自分のラズパイ番号でアクセスします。
左側のメニューで[Stream]を選ぶと映像が表示されます。全部のメニューを試して遊んでください。英語ですがブラウザの日本語に翻訳で読みやすくなります。
映像だけ表示するには[http://razpi**.local:8080/?action=stream]のURLでアクセスします。