ラズパイ用広角カメラ(160°)
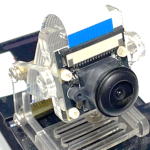
ラズベリーパイ(Raspberry Pi 3B+)の標準カメラの視野は狭い。ラズタンクを操作するが足元や左右を見渡せないので他のラズタンクにぶつかったり、見えないので横の壁にぶつかったりする。AliExpressで約60
ラズベリーパイ(Raspberry Pi 3B+)の標準カメラの視野は狭い。ラズタンクを操作するが足元や左右を見渡せないので他のラズタンクにぶつかったり、見えないので横の壁にぶつかったりする。AliExpressで約60

ラズパイで python コードのアプリを作ってみよう 天気予報アプリを作ってみる。 OpenMeteoという無料APIサービスを呼び出して、今日の最高気温を取得してみる。まずは下記URLをコピーしてWEBブラウザで開い

コマンドプロンプト[cmd.exe]でラズパイにログインして nano エディタでプログラム・コードを書いています。コピー&ペーストがやり難いという悩みもあるので、いよいよ楽するために Visual Stduio Cod

2025年度のラズタンク開発者に、四期生3名の参加が決定しました!部品調達と加工の下ごしらえも着々と進んでいます。お楽しみに! 部品調達 タミヤの部品「ユニバーサルプレート、ダブルギヤボックス」が生産終了で困っていました

ラズタンク開発の技術ドキュメント一覧がなかったのでリストを整理します 構想 カメラ映像 プログラミングサンプル 応用編(自動運転) Node-RED操作 ラズパイ組み立て インターネット 開発環境 工具/部品 Linux
CoderDojo青梅 午後の部ではラズベリーパイ&電子工作をテーマに、プログラミングを遊んで学習しています。2022年から子どもたちの意見を取り入れつつ、ラズタンクを進化させて今年は4年目、4期生を募集することになりま

MySQL データベースに読み/書き/更新/削除できる WEBアプリ のコードサンプルです 前提(準備できていること) バックエンドアプリ[app.js]が実行されていて、ポート3000などで待ち受けされていることが前提
24年版Node-REDフローを掲載します。間に合わなかった人、フローが消えちゃった人、完成版を改造するのもいいかな。 フロー フロー読み込み方 Node-REDフローの右上メニュー[読み込み]で下記JSONをコピペして

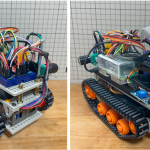
ラズタンクに赤外線障害物センサー2個を追加して、障害物を回避しながら自動走行する 追加した部品(IR赤外線障害物回避センサー) ラズタンク(ここまでの完成の姿) センサーの感度調整 このセンサーは障害物までの距離を変更(
ボタンを押したら、何かひとつだけ動くすごく単純なコードから練習してみます。 ボタンを押してテキストを表示する HTMLファイルを新規作成 最小限のHTMLファイルを新規作成します。ファイル名はどんな名前でも構いませんが拡
JavaScriptでMySQLを使うためのコマンドを記録します Node.jsモジュールをインストール Node.js + Express で MySQLを使う時は、Expressモジュール及びMySQLデータベースの

Node-REDのUIダッシュボードにキーボード操作できるAPIを追加する。ラズタンクのカメラ映像を見ながら[W][A][S][D]キーボードで前後左右に運転する。これならブラインドタッチでラズタンクを操作できるので競技

API(アプリケーション プログラミング インターフェース)は、あるプログラムから別のプログラムの機能を使うしくみのこと。ラズタンクでは、メインとなるリモート操作パネルをフロントエンドの「 HTML + JavaScri
8個のLEDをアドレス指定して個別にRGBカラー表示できるNeoPixelを、マイクロビット(micro:bit)で操作するコードを試します。 その1.基礎編(赤・緑・青に点灯するコード) 3つのボタンを押したら、赤(R

レジンという光に当てると固まる液体がある、と教えてもらったのでやってみた。材料は、UV-LEDレジン星の雫ハードタイプ30g透明が1,500円、そしてシリコンモールド(型)。名前がUV-LEDだけど、電気で点灯するLED
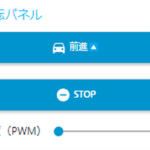
ラズタンク動作(前進のみ) Node-Redフローを設定する ラズタンク動作(停止する) Node-Redフローを設定する 動作テスト WEBブラウザのURL[http://razpi10.local:1880/ui]を
ラズタンク動作(前進のみ) Node-Redフローを設定する ラズタンク動作(停止する stop) Node-Redフローを設定する URL命令を呼び出してみよう 前進するときは[http://razpi10.local
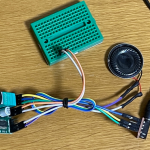
リモートで運転するラズタンク。遠隔地で救助を待つ被災者に、ラズタンクがやさしく話しかける。 配線図 ボリュームコントロールは、電源にもなっている様子(カチッというまで左に回すとOFF、カチッと右に回すと音量が大きくなる)
JavaScript の復習 まずは JavaScript を動かす基本を確認しましょう。ラズパイでもWindowsでも構わないので、どこかのフォルダに2つのファイル(test.html と test.js)を作ります。
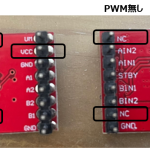
(モータードライバーが違う!?) 5月のCoderDojo青梅で皆に配ったモータードライバーにPWM信号がありませんでした!誤って注文してしまったようです。PWMでのスピード制御ができないので、すいらぼさんのフロー「No