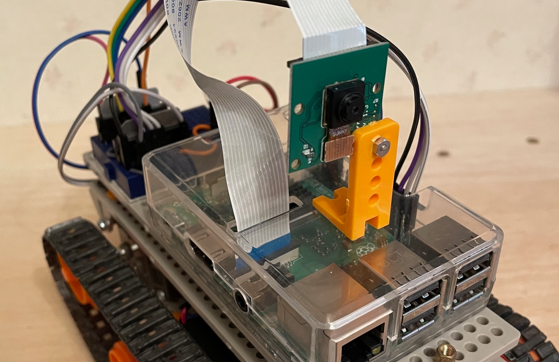
こちらのスクリプトは、Raspberry Piとカメラ、モーターを組み合わせて、赤色の物体を検出しながらラズタンク(ロボットカー)を自動運転するプログラムです。
プログラムの概要
目的:
- カメラ映像から赤色の物体を検出し、それに応じてロボットの進行方向を制御する。
特徴:
- OpenCVによる画像処理(赤色検出、輪郭検出、ラベリング)
- GPIO経由でモーター制御(進む、止まる、曲がる)
- 最大面積の赤色領域を中心に方向判断
- キーボード割り込みや例外処理付きで堅牢
ステップごとの解説
① 初期設定
cv2.VideoCapture():USBカメラ起動&映像パラメータ設定- GPIOでラズタンクのモーター制御ピンをセットアップ
② メインループ(main() 関数)
- カメラ画像を読み取り
- 上下反転で正しい向きに調整
detectRed()関数で赤色領域を抽出(HSV色空間利用)- 輪郭検出して視覚化
- ラベリングして最大の赤色領域を検出
③ 赤色の位置による行動判断
- 赤色の重心X座標から方向を判断
- 左端 → 左に曲がる
- 右端 → 右に曲がる
- 中央 → まっすぐ進む
- 表示メッセージとともにモーターを制御
④ 赤色が検出されない場合
- “No Red found”メッセージを表示してモーターを停止
⑤ 終了処理
KeyboardInterrupt(Ctrl+Cなど)で終了時にGPIOとカメラをクリーンアップ
detectRed関数のしくみ
HSV色空間で「赤色」を2つの範囲に分けて検出:
- 領域1:暗めの赤
- 領域2:鮮やかな赤
→mask1 + mask2で統合された赤色領域を出力
モーター制御関数
| 関数 | 動作 |
|---|---|
moveForward() | 前進 |
moveStop() | 停止 |
speedHigh() | 高速モード(Duty:100) |
speedCurveLeft() | 左旋回(右速・左遅) |
speedCurveRight() | 右旋回(左速・右遅) |
以下のPythonコードを分析して、自動運転のプログラムを開発しよう
pythonコードを新規ファイルで作ります
$ nano video-track.py
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import RPi.GPIO as GPIO
import time
import sys
import cv2
from timeout_decorator import timeout
import numpy as np
import readchar
# -------------- カメラ設定
camera = cv2.VideoCapture(0) # 0 = Device ID
camera.set(cv2.CAP_PROP_FOURCC, cv2.VideoWriter_fourcc('Y','U','Y','V')) # YUYV = CODEC
camera.set(cv2.CAP_PROP_FRAME_WIDTH, 640) # 320 640 800 1024
camera.set(cv2.CAP_PROP_FRAME_HEIGHT, 480) # 240 480 600 576
camera.set(cv2.CAP_PROP_FPS, 3) # 24 frame rate N per sec
# -------------- モーター設定
constLeftPWM = 17 #GPIO No.
constLeftIN1 = 27 #GPIO No.
constLeftIN2 = 22 #GPIO No.
constRightPWM = 16 #GPIO No.
constRightIN1 = 20 #GPIO No.
constRightIN2 = 21 #GPIO No.
GPIO.setwarnings( False )
GPIO.setmode( GPIO.BCM )
GPIO.setup( constLeftPWM, GPIO.OUT )
GPIO.setup( constLeftIN1, GPIO.OUT )
GPIO.setup( constLeftIN2, GPIO.OUT )
GPIO.setup( constRightPWM, GPIO.OUT )
GPIO.setup( constRightIN1, GPIO.OUT )
GPIO.setup( constRightIN2, GPIO.OUT )
pwmLeft = GPIO.PWM( constLeftPWM, 50 ) #50Hz
pwmLeft.start( 0.0 )
pwmRight = GPIO.PWM( constRightPWM, 50 ) #50Hz
pwmRight.start( 0.0 )
######################################
# メインルーチン
######################################
def main():
print('[1]\n[q][W][e]\n[A][S][D]\n[z][X][c] to STOP\n[1] to QUIT')
while True:
try:
ret, frame = camera.read() # カメラ画像を取得
if not ret:
break
imgPic = cv2.flip(frame,-1) # 上下反転:-1
# 元画像から赤色を検出する
mask = detectRed( imgPic ) # 赤色を検出
#cv2.imshow( "Frame", imgPic )
#cv2.imshow( "Mask", mask )
# 検出した赤色の輪郭を見つける
contours, hierarchy = cv2.findContours( mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE )
outputImg = cv2.drawContours( imgPic, contours, -1, (0,255,0), 3 )
#cv2.imshow( "Fin", outputImg )
#ラベリング処理, ラベリング画像に追加して、さらにブロブ(連続した領域)の領域(位置、幅、高さ)と面積、重心の情報を出力します。
# nlabels=ラベル個数, labels=ラベリング画像, stats=[左上のx座標,y座標,幅,高さ,面積],center=ラベル毎の重心情報
nlabels, labels, stats, center = cv2.connectedComponentsWithStats(mask)
max_index = np.argmax(stats[:,4]) # 最大面積の赤色箇所を選ぶ
#円を描画
#for i in range(nlabels-1):
# cv2.circle(imgPic, (int(center[i+1][0]), int(center[i+1][1])), 10, (210, 200, 0), thickness=10)
#print(nlabels, labels, stats, center, max_index)
# 赤色を検出していないときはラベル数は1個なので、検出できた2個以上のときに丸印を追加する。
if (nlabels > 1):
cv2.circle(imgPic, (int(center[max_index+1][0]), int(center[max_index+1][1])), 10, (210, 210, 0), thickness=10)
# 画面[640]の半分よりもどちら?
intX = int(center[max_index+1][0])
if ( intX > 420 ):
cv2.putText( imgPic, "Go Right", (30,50), cv2.FONT_HERSHEY_SIMPLEX, 1, (255,0,0) )
speedCurveRight()
moveForward()
elif ( intX < 220 ):
cv2.putText( imgPic, "Go Left", (30,50), cv2.FONT_HERSHEY_SIMPLEX, 1, (255,0,0) )
speedCurveLeft()
moveForward()
else:
cv2.putText( imgPic, "Go Straight", (30,50), cv2.FONT_HERSHEY_SIMPLEX, 1, (255,0,0) )
speedHigh()
moveForward()
else:
#検出しなかったとき
cv2.putText( imgPic, "No Red found", (30,50), cv2.FONT_HERSHEY_SIMPLEX, 1, (255,0,0) )
moveStop()
cv2.imshow( "Main", imgPic )
key = cv2.waitKey(1)
except IndexError:
print("IndexError を無視します" + str(max_index) + str(stats) )
except KeyboardInterrupt:
camera.release()
cv2.destroyAllWindows()
pwmLeft.stop()
pwmRight.stop()
GPIO.cleanup()
sys.exit()
# 赤色検出
@timeout(5) # measure()関数のタイムアウト時間を設定する
def detectRed( img ):
hsv = cv2.cvtColor( img, cv2.COLOR_BGR2HSV ) # 色空間をHSVに変換(色相H, 彩度S, 明度V)
# 領域1
hsv_min = np.array( [100, 127, 0] ) # 赤色の範囲(最小)
hsv_max = np.array( [30, 255, 255] ) # 赤色の範囲(最大)
mask1 = cv2.inRange( hsv, hsv_min, hsv_max ) # 2色に変換するための領域2
# 領域2
hsv_min = np.array( [150, 127, 50] ) # 赤色の範囲(最小)
hsv_max = np.array( [180, 255, 255] ) # 赤色の範囲(最大)
mask2 = cv2.inRange( hsv, hsv_min, hsv_max ) # 2色に変換するための領域2
return mask1 + mask2
# ------------------------- ラズタンクのモーター
def moveForward():
GPIO.output( constLeftIN1, 1 )
GPIO.output( constLeftIN2, 0 )
GPIO.output( constRightIN1, 1 )
GPIO.output( constRightIN2, 0 )
def speedSlow():
pwmLeft.ChangeDutyCycle( 80 )
pwmRight.ChangeDutyCycle( 80 )
def speedHigh():
pwmLeft.ChangeDutyCycle( 100 )
pwmRight.ChangeDutyCycle( 100 )
def speedCurveRight():
pwmLeft.ChangeDutyCycle( 100 )
pwmRight.ChangeDutyCycle( 30 )
def speedCurveLeft():
pwmLeft.ChangeDutyCycle( 30 )
pwmRight.ChangeDutyCycle( 100 )
def moveBack():
GPIO.output( constLeftIN1, 0 )
GPIO.output( constLeftIN2, 1 )
GPIO.output( constRightIN1, 0 )
GPIO.output( constRightIN2, 1 )
def moveLeft():
GPIO.output( constLeftIN1, 0 )
GPIO.output( constLeftIN2, 1 )
GPIO.output( constRightIN1, 1 )
GPIO.output( constRightIN2, 0 )
def moveRight():
GPIO.output( constLeftIN1, 1 )
GPIO.output( constLeftIN2, 0 )
GPIO.output( constRightIN1, 0 )
GPIO.output( constRightIN2, 1 )
def moveStop():
GPIO.output( constLeftIN1, 0 )
GPIO.output( constLeftIN2, 0 )
GPIO.output( constRightIN1, 0 )
GPIO.output( constRightIN2, 0 )
# ----------------------------メインをスタート
if __name__ == '__main__':
main()
赤色だけを検出したサンプル。