Pythonコードを実行前に、「キーボード入力を読み取るライブラリreadchar」をインストールします
$ sudo pip install readchar以下がラズタンクのpythonコードです。
例えば[$ sudo nano tank.py]などで新しいファイルを作ってコードを書きます。
正しく入力できたら[$python tank.py]でプログラムを実行します。
操作は[w]キーで前進、[a]キーで左反転、[s]キーで右反転、[z]キーが後進です。
終了は[q]キー。
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import RPi.GPIO as GPIO
import sys
import time
import readchar
constLeftPWM = 17
constLeftIN1 = 27
constLeftIN2 = 22
constRightPWM = 16
constRightIN1 = 20
constRightIN2 = 21
GPIO.setwarnings( False )
GPIO.setmode( GPIO.BCM )
GPIO.setup( constLeftPWM, GPIO.OUT )
GPIO.setup( constLeftIN1, GPIO.OUT )
GPIO.setup( constLeftIN2, GPIO.OUT )
GPIO.setup( constRightPWM, GPIO.OUT )
GPIO.setup( constRightIN1, GPIO.OUT )
GPIO.setup( constRightIN2, GPIO.OUT )
pwmLeft = GPIO.PWM( constLeftPWM, 50 ) #50Hz
pwmLeft.start( 0.0 )
pwmRight = GPIO.PWM( constRightPWM, 50 ) #50Hz
pwmRight.start( 0.0 )
def moveForward():
GPIO.output( constLeftIN1, 1 )
GPIO.output( constLeftIN2, 0 )
GPIO.output( constRightIN1, 1 )
GPIO.output( constRightIN2, 0 )
def speedSlow():
pwmLeft.ChangeDutyCycle( 80 )
pwmRight.ChangeDutyCycle( 80 )
def speedHigh():
pwmLeft.ChangeDutyCycle( 100 )
pwmRight.ChangeDutyCycle( 100 )
def moveBack():
GPIO.output( constLeftIN1, 0 )
GPIO.output( constLeftIN2, 1 )
GPIO.output( constRightIN1, 0 )
GPIO.output( constRightIN2, 1 )
def moveLeft():
GPIO.output( constLeftIN1, 0 )
GPIO.output( constLeftIN2, 1 )
GPIO.output( constRightIN1, 1 )
GPIO.output( constRightIN2, 0 )
def moveRight():
GPIO.output( constLeftIN1, 1 )
GPIO.output( constLeftIN2, 0 )
GPIO.output( constRightIN1, 0 )
GPIO.output( constRightIN2, 1 )
def moveStop():
GPIO.output( constLeftIN1, 0 )
GPIO.output( constLeftIN2, 0 )
GPIO.output( constRightIN1, 0 )
GPIO.output( constRightIN2, 0 )
def end():
pwmLeft.stop()
pwmRight.stop()
GPIO.cleanup()
sys.exit(0)
######################################
# メインルーチン
######################################
if __name__ == '__main__':
try:
while True:
kb = readchar.readchar()
sys.stdout.write(kb)
if kb == 'w':
speedHigh()
moveForward()
if kb == 'z':
speedSlow()
moveBack()
if kb == 'a':
speedSlow()
moveLeft()
if kb == 's':
speedSlow()
moveRight()
if kb == 'x':
moveStop()
if kb == 'q':
end()
time.sleep(0.1)
except KeyboardInterrupt:
moveStop()
end()
コードサンプル
音楽ファイルの再生(mp3)
omxplayer ../Music/music00.mp3 -o local --vol 100音楽ファイルの再生(wav)
aplay -D hw:1,0 ../Music/s-ok.wav音量設定
alsamixer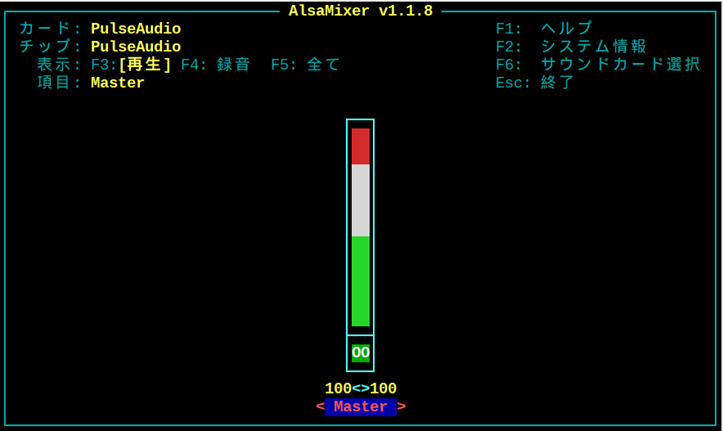
音声合成(jtalk)
男性の声
./jtalk.sh "こんにちは"女性の声
./jtalk_mei.sh "めいちゃんの声です", "happy"