micro:bit2個を使ってリモコンカーを作る
1. 構想(何をするのか全体の概要)
日曜日の朝、発起人3名で何を作るのかオンラインで話し合いをした。
全員、micro:bit を2個ずつ持っているので、タイヤで動く自動車を作ってみたいということになり、
どんな自動車なのか、どんな機能があるのか、みんなで話し合って設計していくことになった。
2. 要件定義(機能と性能を定める)
みんなで意見を出し合って、リモコン自動車の機能(できること)と性能を定義してみた。
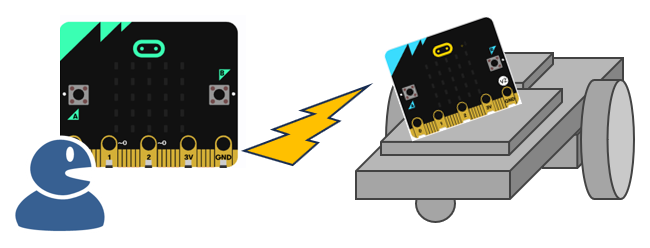
- リモート操作は、micro:bitを2個使って、送信側・受信側として通信ができる
- 自働車は、タイヤ2個を使って、サーボモーター駆動で走行できる
3. 基本設計(実現方法を決定する)
要件定義をどうやって実現するのか、みんなで意見を出し合ってみた。
- リモート操作(操作側)は、micro:bitのABボタンなどの入力デバイスを使って、前進・後進・左右移動などの入力操作とし、通信機能のメッセージで送信する。
- リモート操作(操作される側)は、micro:bitの通信機能のメッセージを受信したら、前後モーター回転などを実行する。
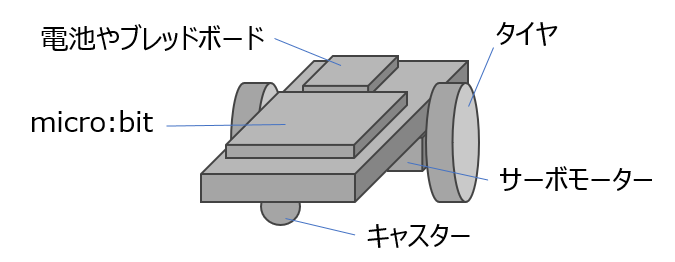
- 自働車の駆動方法は、後ろタイヤ2個、前はボール型キャスター1個とする。
- 自働車の後ろタイヤはサーボモーターを動力源とする
- 自働車の電源は、乾電池2本または3本とする。モーター2個を駆動するので3本以上が理想ではないかとの意見
- 自動車の車体はスチレンボードを使って、自由に形を決める
- 自動車は障害物があると自動停止するアイサイト的な安全装置もつける
4. 部品構成
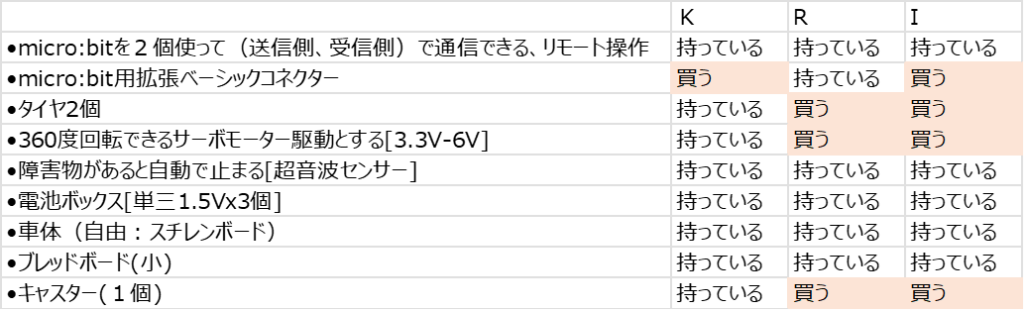
リモート操作に必要な部品、組み立てる自動車に必要な部品を、みんなで列挙してみた。
- micro:bt x 2個; リモート操作側、操作される側でひとつずつ
- micro:bit拡張ベーシックコネクター x 1個; 自動車の配線ケーブルやハンダ付けが不要になる
- タイヤ x 2個; サーボモーターに直接組み立てできる FS90R 対応タイヤ 直径60mm
- キャスター x 1個; 車体全体をタイヤとキャスターの3点で地面に接地する
- サーボモーター x 2個; 360度回転できるサーボモーター FS90R 電圧 3.3V-6.0V
- 超音波センサー x 1個; 障害物との距離を音波で計測する
- 電池ボックス x 1個; 単三乾電池3本[4.5V = 1.5V x 3本]
- 車体 x 1個; スチレンボードなどの素材から自由に加工する
- ブレッドボード小 x 1個; ハンダ付け無しで配線しやすくなる
購入計画
5. 今後の計画
まず部品を注文するので、部品が揃ったら、各自、自宅で好きなペースで車体の設計・組み立てをする。プログラミングもゼロから自分で作ってみる。
CoderDojo青梅での取り組みは、午前が「Scratch, micro:bitその他何でもあり」、午後が「ラズパイ&電子工作」なので自宅での成果を発表したり、午前の時間に仲間と一緒に相談しながら開発する。
鹿野さん。こんにちは。
micro:bitの拡張ボードの件ですが、以下のURLの商品でいいですか?
https://www.amazon.co.jp/Plouluyt-%E3%83%9E%E3%82%A4%E3%82%AF%E3%83%AD%E3%83%93%E3%83%83%E3%83%88%E6%8B%A1%E5%BC%B5%E3%83%9C%E3%83%BC%E3%83%89%E3%80%81IOBIT-V2-0%E3%83%96%E3%82%B6%E3%83%BC%E4%BB%98%E3%81%8D%E3%83%96%E3%83%AC%E3%82%A4%E3%82%AF%E3%82%A2%E3%82%A6%E3%83%88%E3%82%A2%E3%83%80%E3%83%97%E3%82%BF%E3%83%BC%E3%82%B7%E3%83%BC%E3%83%AB%E3%83%89%E3%80%81BBC-%EF%BC%9ABit-Kids%E3%81%AEPyon%E3%82%B0%E3%83%A9%E3%83%95%E3%82%A3%E3%83%83%E3%82%AF%E3%83%97%E3%83%AD%E3%82%B0%E3%83%A9%E3%83%9F%E3%83%B3%E3%82%B0%E7%94%A8/dp/B0BLD198XJ/ref=d_pd_sbs_hintsv3_sccl_2_4/357-2506679-3117702?pd_rd_w=AOH4j&content-id=amzn1.sym.9cf41ab4-9bb1-4c1f-998d-58dec8b0946c&pf_rd_p=9cf41ab4-9bb1-4c1f-998d-58dec8b0946c&pf_rd_r=X6HTYV37G2YWNP92AFS3&pd_rd_wg=AjqJt&pd_rd_r=5d694e9f-1181-447f-98d4-15a78957b7c7&pd_rd_i=B0BLD198XJ&psc=1
すいらぼさん、
さまざまな機能のmicro:bit拡張ボードがありますが、このタイプは機能豊富で十分と思います。
かのさん、
わかりました。
組み立てられたら投稿します。
よろしくお願いします。