ラズパイのGPIOに接続したサーボモーター(SG90)をNode-REDのダッシュボードで操作します。

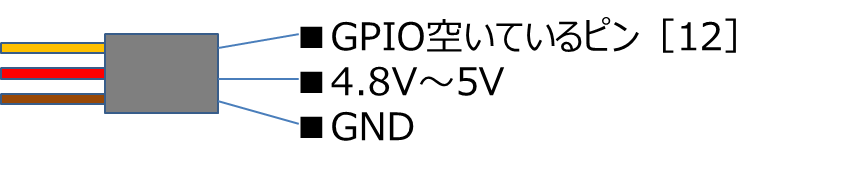
サーボモーターをGPIOに接続します。
Node-RED開発ツールにアクセスします。
- ノートPCでラズパイにアクセス
DOSコマンドプロンプト[c:\> ssh pi@razpi00.local] - Node-REDアプリを起動
コンソール[pi@razpi00.local:~$ node-red-start] - Node-RED開発ツールにアクセス
WEBブラウザ[http://razpi00.local:1880/]
Node-RED[ダッシュボード]ノードを追加
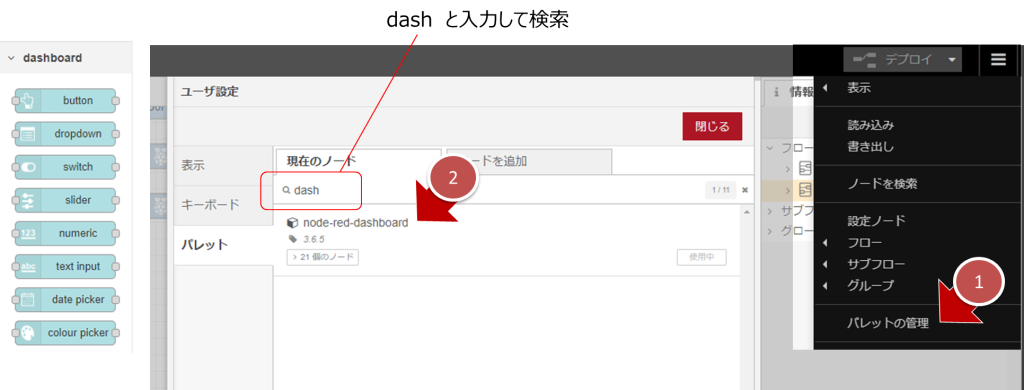
Node-REDにダッシュボード・ノード[node-red-dashboard]を追加する
Node-RED[GPIOD]ノードを追加
サーボモーター用のノード機能[node-red-node-pi-gpiod]を追加する

ラズパイ用GPIODデーモンを起動
GPIOのサーボモーターをプログラミングして操作できるようにするので、[pigpiod]デーモン(常駐ソフト)を起動する。
$ sudo pigpiodNode-REDのフローを作成
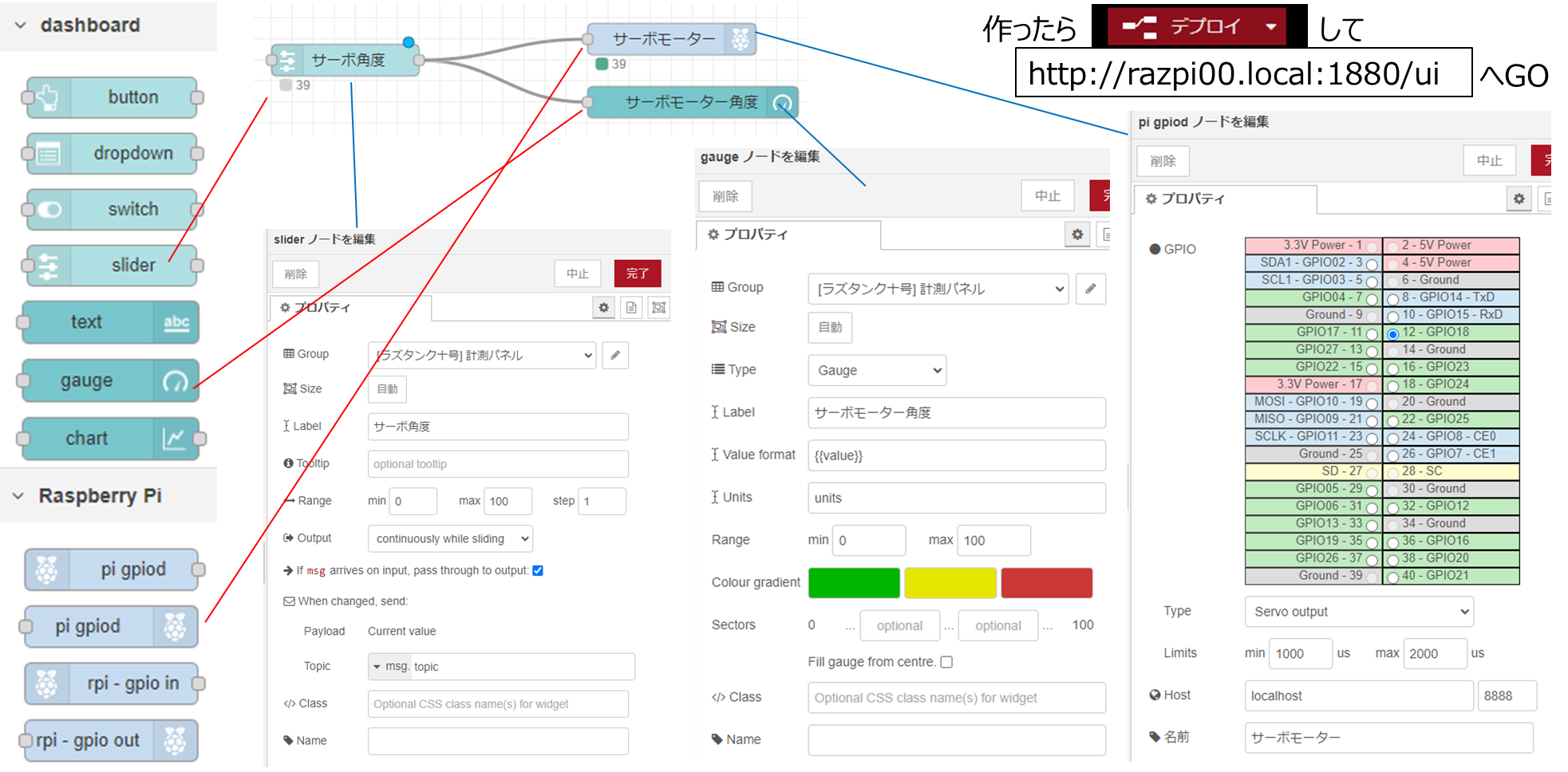
動作検査
スライダーを動かして、ゲージメーターが動くことと、サーボモーターが回転することを検査します。
以上