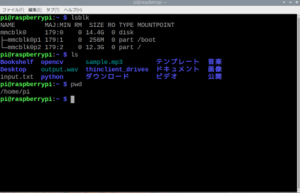
コマンドプロンプト[cmd.exe]でラズパイにログインして nano エディタでプログラム・コードを書いています。コピー&ペーストがやり難いという悩みもあるので、いよいよ楽するために Visual Stduio Cod […]
VS code でコードを書こう

コマンドプロンプト[cmd.exe]でラズパイにログインして nano エディタでプログラム・コードを書いています。コピー&ペーストがやり難いという悩みもあるので、いよいよ楽するために Visual Stduio Cod […]

CoderDojo青梅で使う初期設定済みのマイクロSDを使います 準備:ラズパイをノートPCに接続する ノートPCからラズパイにログインしたいので、有線LANケーブルで、PCとラズパイのLAN端子に接続する。 Linux […]
あっというまに大会になり、一瞬で終わりましたね。今年からこのように結果を書き込んで行けたらなと思います。 1.競技内容 競技内容は の3つです。くわしいルールやコースはhttps://funnygeekjp.com/mn […]
続きを読む… from コーダー道場 青梅カップ2024結果

あっというまの1年間でした。Pythonコマンドとカクカク映像での運転を改善するため、MJPGストリーミングと見た目のかっこいいWEBダッシュボードを開発した1年間です。この成果を2025年3月9日(日)午後の部で発表し […]
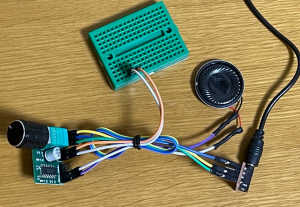
リモートで運転するラズタンク。遠隔地で救助を待つ被災者に、ラズタンクがやさしく話しかける。 配線図 ボリュームコントロールは、電源にもなっている様子(カチッというまで左に回すとOFF、カチッと右に回すと音量が大きくなる) […]
どうも久しぶりの投稿です。今回はNode-redという物を利用してwebからラズパイに付いているカメラを見る方法です。 完成形 まずは完成形です。 作り方 早速作り方です。まずはリモートデスクトップを使ってラズパイと繋げ […]
続きを読む… from Node-redを利用してラズパイのカメラをwebで見る
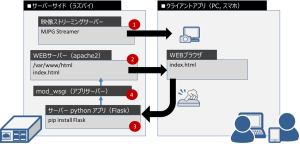
PCでキー操作して、ラズパイでpythonコードを実行する STEP1. キー操作画面はWEBサーバー(2)で配信して、同じネットワークにあるPCがキー操作をする。STEP2. キー操作に対応するpythonアプリ(3) […]
続きを読む… from WEBアプリでラズパイ操作(Flask, Python)

ラズパイの映像ストリーミング。WEBブラウザでサクサク表示する映像にする ラズパイカメラの映像をネットワークに配信する。下図(1)番の部分を準備します。 ラズパイの環境を確認します。 CoderDojo青梅のラズタンク […]
続きを読む… from 映像ストリーミング(MJPG Streamer)
目次 ラズパイ4にリモートデスクトップ接続したい(できないとき) ラズパイ4で xrdp 接続できない時は、同じ「pi」ユーザーが2個同時にログインしないようにする。ラズパイに「xrdp」がインストールされている前提です […]

開発者のためのプラットフォーム GitHubGitHubは、複数のプログラマーが共同でコードを開発する場所。置き場所をリポジトリという。 CoderDojo青梅のラズタンク用プログラム集は、GitHubから最新のコードを […]

大会概要 完成したラズタンク全9台で、コースを走破してゴールを目指す。競技は3つ。保護者のみ観客OK。学校と違って、競争もします。 開催日 12月10日(日)午後 大会前の準備 12月の大会めざして、9月~11月は試運転 […]
続きを読む… from CoderDojo青梅カップ 2023大会

数秒毎・毎分など一定間隔もしくは決まった時刻にコードを実行する cron という機能を使って、一定間隔でカメラ撮影します。 例えば、このロボットは3秒間に1回ずつ連続写真を撮影したもの。みんなは何を撮影してみたいですか? […]