あっというまに大会になり、一瞬で終わりましたね。今年からこのように結果を書き込んで行けたらなと思います。 1.競技内容 競技内容は の3つです。くわしいルールやコースはhttps://funnygeekjp.com/mn […]
続きを読む… from コーダー道場 青梅カップ2024結果
あっというまに大会になり、一瞬で終わりましたね。今年からこのように結果を書き込んで行けたらなと思います。 1.競技内容 競技内容は の3つです。くわしいルールやコースはhttps://funnygeekjp.com/mn […]
続きを読む… from コーダー道場 青梅カップ2024結果
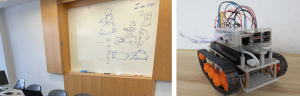
CoderDojo青梅 午後の部ではラズベリーパイ&電子工作をテーマに、プログラミングを遊んで学習しています。2022年から子どもたちの意見を取り入れつつ、ラズタンクを進化させて今年は4年目、4期生を募集することになりま […]
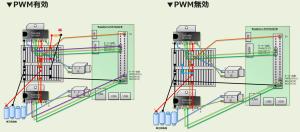
PWMによるスピード調節がうまく動かないので今回は一定速度で再設計する。ラズタンクの前進速度がハイスピード、後進がスローにしたかったので、PWM(パルス信号)を使う方式を検討した。前進100%スピード、後進50%スローと […]
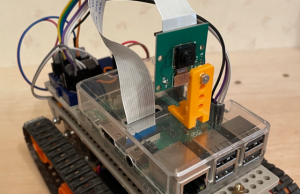
ラズパイカメラ・モジュール(レガシーカメラ) 【注意】※最新のラズパイOSでは基盤に実装するカメラが非対応と悲しい。「Raspberry Pi OS (Legacy)」をインストールして使います。 本日のメニュー 開発者 […]

ラズベリーパイを搭載したトラックベルト駆動(キャタピラ)の走行車を組み立てした。次はメディア系の機能を搭載する。 本日のメニュー 準備[PCでラズパイにリモートデスクトップ接続] Windows の DOS でラズパイか […]