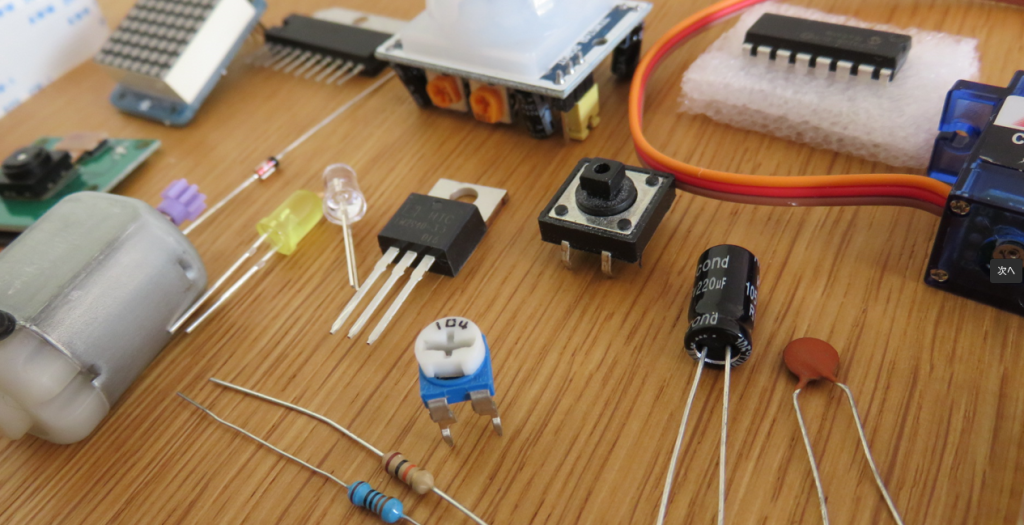
ラズタンクやマイクロビットに使う/使った部品リストを記録しようと思います。
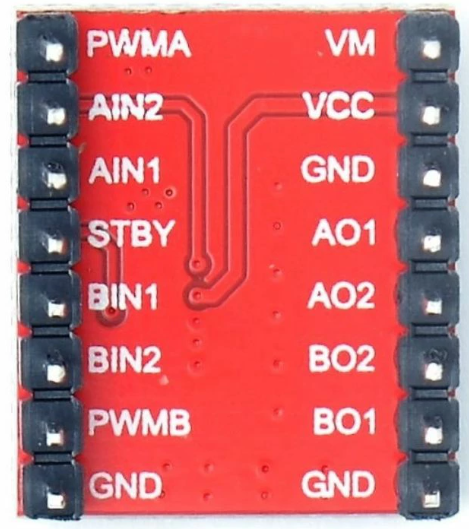
モータードライバ(TB6612FNG)
タミヤのモーターを回転・逆回転させるためのICです。データシートはこちら。
・ 電源電圧 : VM = 最大15 V
・ 出力電流 : IOUT = 平均1.2 A / ピーク3.2 A
・ 正転/逆転/ショートブレーキ/ストップ制御機能

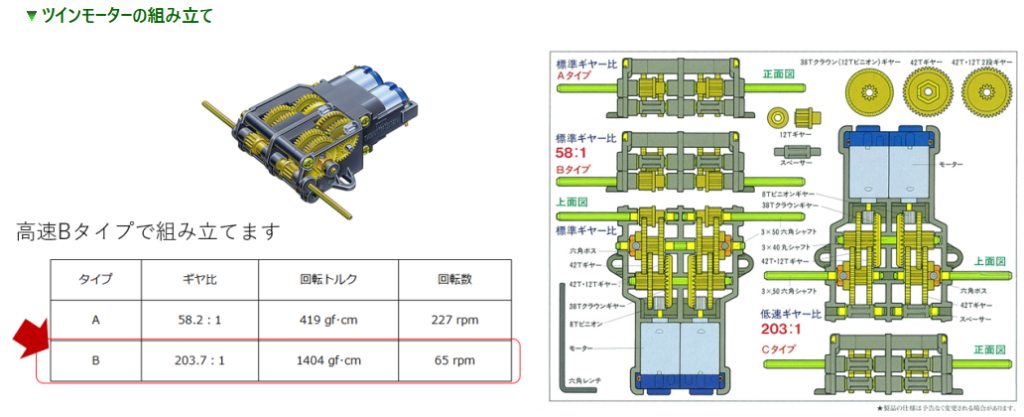
タミヤのツインモーターギアボックスのモーター
タミヤのツインモーターギアボックスに搭載されているFA-130モーターの動作電圧は1.5V~3Vです。
推奨電圧は1.5Vで、最大効率時の回転数は9710RPMとなっています。
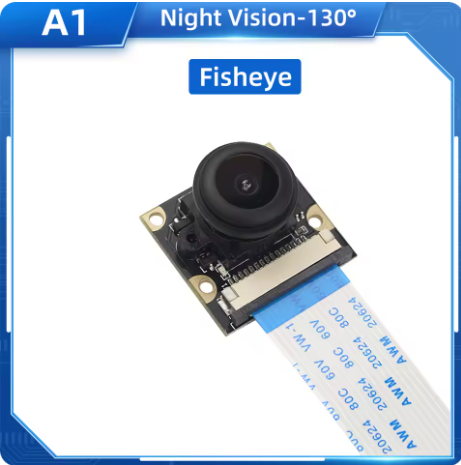
Raspberry Pi 広角カメラ
Raspberry Pi広角カメラ,オプションの暗視,魚眼レンズ,IR-CUT,ff af,4b,1b,zero,5mp,1080p
互換性 Raspberry Pi 4B/3B+/3B/Zero
None Night vision, 130°, IRライトなし
センサー: OV5647
三端子レギュレーター
- 部品の役割:高い電圧から低い電圧をつくる
- 部品名称:低損失三端子レギュレーター 3.3V1A, LM2940T-3.3
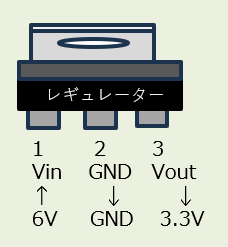
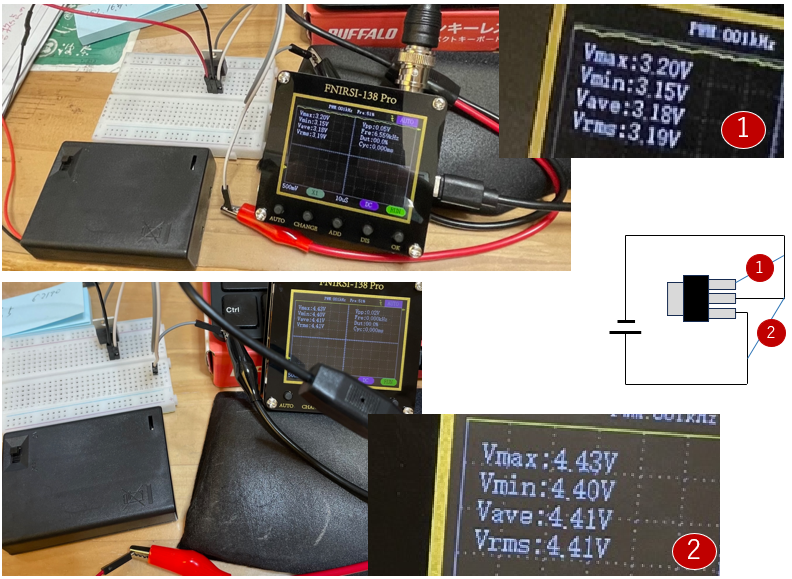
単三乾電池3本(4.5V = 1.5V x 3本)で試してみる。
このレギュレーターを使うと、例えば1個の乾電池BOXで、平均 3.18V と 平均 4.41Vの2つの電圧を使えるようになります。
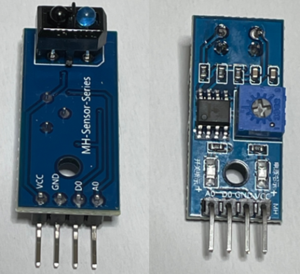
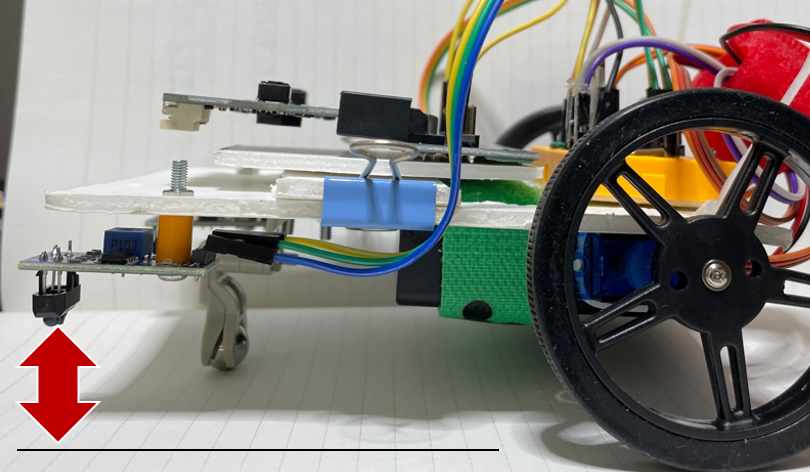
赤外線反射センサーモジュール
TCRT5000赤外線反射センサーモジュールIR追跡センサー 障害物回避モジュール,バリアライントラック,モジュール カーロボット用
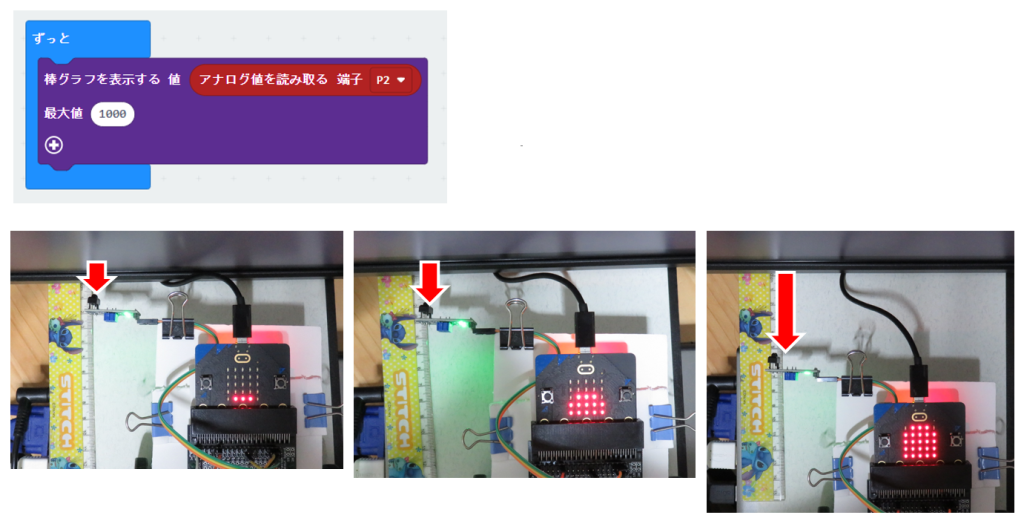
micro:bitの入力値は
アナログ値は[0V~3V]がかかったとき、makecodeでは[0~1023]の値を読み取る。
デジタル値は[0V]のときmakecodeでは[0]Low、[3V]のとき[1]Highとして読み取る。
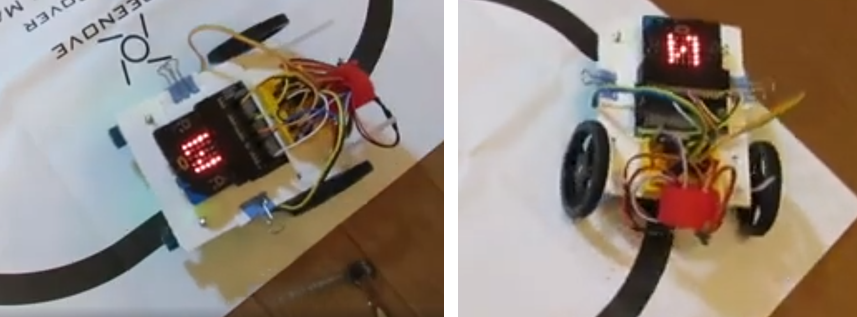
■使ってみた(障害物回避)
Makecodeでアナログ値を読み取るコードを書いて実測。障害物検知は、ぎりぎり 60 mm から検出[値910]し、5 mm 程度まで計測できた[値45]。障害物を検出するなら[値900未満]で衝突回避した方がよさそうだ。
■使ってみた(ライントレース:白色・黒色を検出)
高さ15mmくらいの距離で、黒色・白色を検出。スチレンボードに黒色マジックで線を書いたら、紙のざらつき具合でしょうか、白色・黒色の判別は困難です。今度は、プリンター用紙に黒色マジックで線を書いて、アナログ入力で検出ができました。デジタル入力も試しているのですがずうっと[0]のまま、一旦諦めて、アナログ入力でコーディングします。
■仕様
【仕様】検出反射距離:1mm~25mm、コンパレータ出力、信号がきれい、波形が良い、駆動能力が強い
【特徴】TCRT5000赤外線反射IRセンサーを使用、ポテンショメーター調整感度、
出力形式:デジタルスイッチ、広電圧LM393コンパレーター使用。
【配線】VCC:電源(15mA以上、動作電圧3.3V~5V)のプラス極を接続、
GND:マイナス電源を接続
DO:TTLスイッチ信号出力
AO:アナログ信号出力(距離差出力差電圧、本足)
【用途】本製品は、電力量計パルスデータのサンプリングに使用できます。
ファックス機、シュレッダー、用紙検出。障害物検知、白黒線検知。
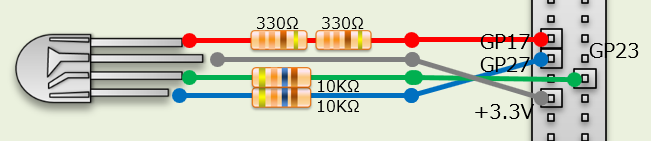
フルカラーLED
RGBの配線とサンプル抵抗
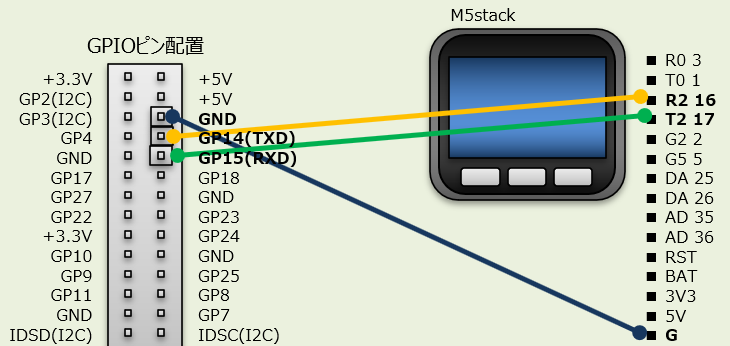
M5stack
M5stackをラズパイに接続してシリアル通信する場合の配線
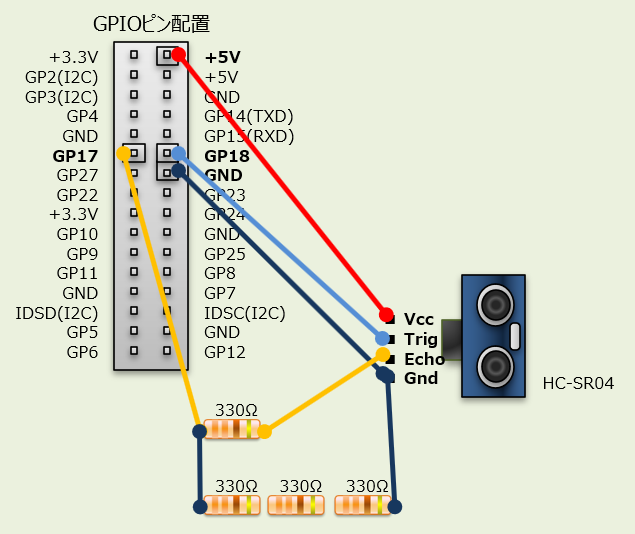
超音波距離センサー
超音波距離センサー HC-SR04 をラズパイに接続する場合の配線例

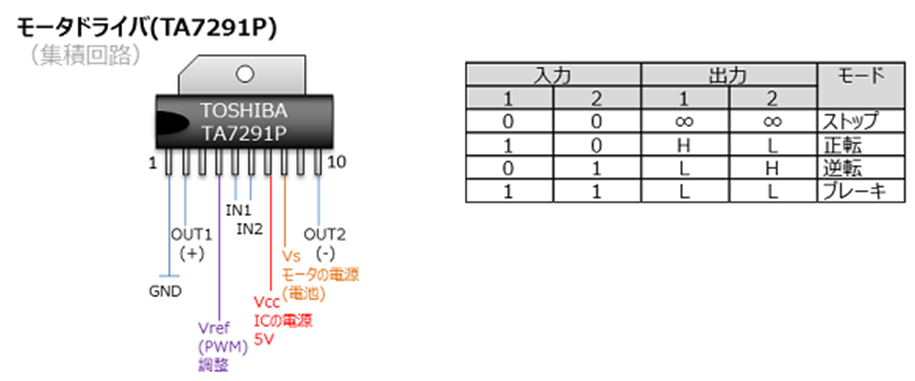
モータードライバ(TA7291P)
ふたつのモーターを正転・逆転に切り替えできる
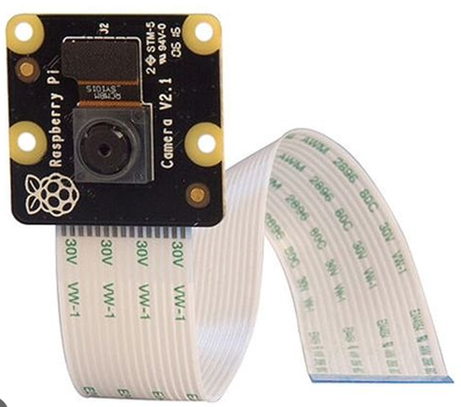
ラズパイカメラ
500万画素CMOSセンサ使用 ラズベリーパイ HDカメラ
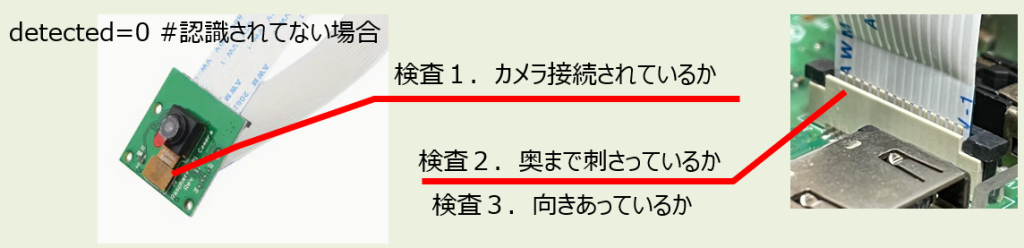
ケーブルの青色を目印する
コネクタを持ち上げたら、ケーブル装着できる装着したら、コネクタを下げる

カメラデバイスが認識されるかテスト
$ vcgencmd get_camera
supported=1 detected=0, libcamera interfaces=0
supported=1 detected=0 #認識されてない
supported=1 detected=1 #認識された
カメラで撮影できるかテスト
$ raspistill -o test.jpg
ラズパイ専用カメラで撮影した画像を保存するコード
$ nano cap.py
import picamera # picamera ラズパイ・カメラ・ライブラリを使う
img = picamera.PiCamera() # カメラライブラリのimgオブジェクトを作る
img.resolution = (800, 600) # 画像解像度 800 x 600 ピクセル
img.rotation = 180 # 画像の回転 180度回転(=上下反転)
img.start_preview() # 設定したパラメータで画像取得
img.led = True # カメラ横のLEDを点灯する
img.capture( "picture.jpg" ) # ファイル名“picture.jpg”で保存する
実行してみる。
$ python cap.py
以降、追加していきます。