PWMによるスピード調節がうまく動かないので今回は一定速度で再設計する。
ラズタンクの前進速度がハイスピード、後進がスローにしたかったので、PWM(パルス信号)を使う方式を検討した。前進100%スピード、後進50%スローとしたとき、モーターが前進はできるが、後進が動かなかった。やむなく前進・更新ともに100%スピードとし、PWMの意味がなかった。
最初の設計(速度調整すると、うまく動かない)
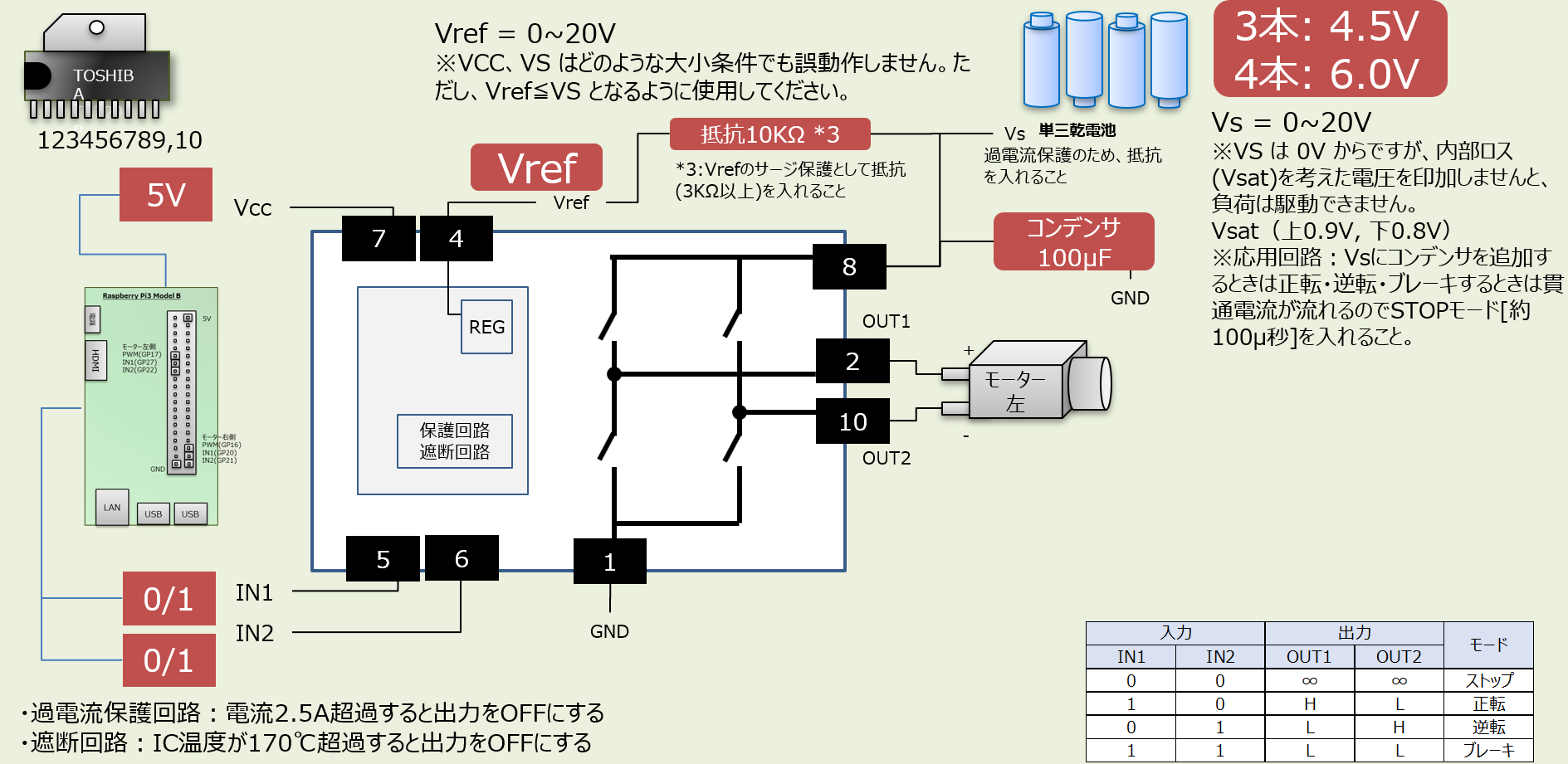
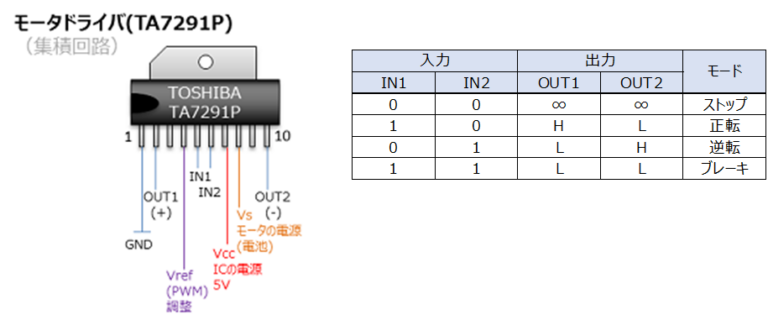
モータードライバー(TA7291P)の入力は次の通りとした。
当初案
PWM(パルス信号)でスピードHigh, Slowを設定したかったが、Highならモーターが回転するが、Slowだとモーターが回転しない。Duty比 80%にしてやっと動くが、それでは100%と大差ない。
- High: 50Hz, Duty比 100%
- Slow: 50Hz, Duty比 50%
改善案
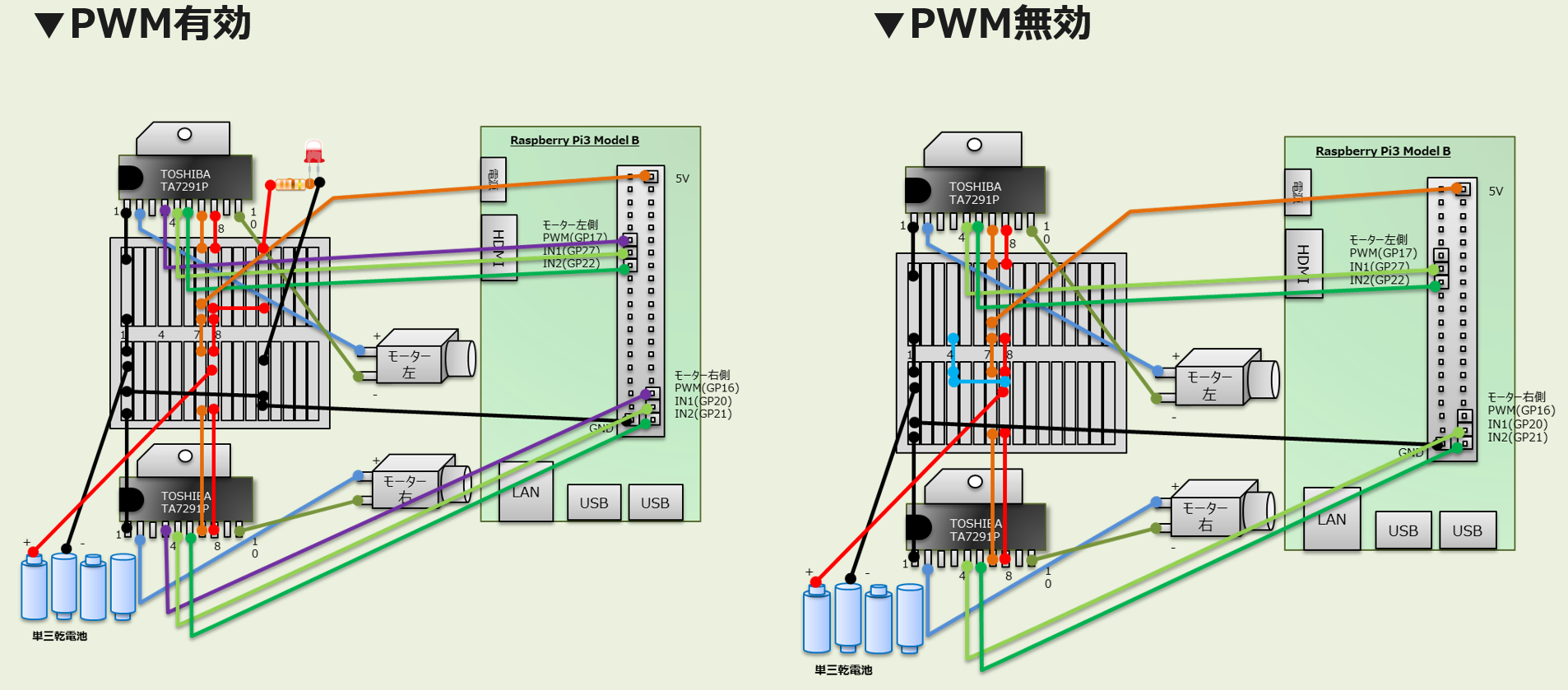
PWMは使わず、常に一定とした(常にDuty比 100%)
今回の設計(一定速度)
PWMを使わず一定速度にするので、PWM無効の配線をする。
おまけ設計(コンデンサ追加)
TA7291Pのデータシートに説明されている応用回路も追加する。電池からのモーター側電源[Vs]にコンデンサ(100μF)を追加した。モーター電圧制御用端子[Vref]にも電池とつなぐが、[Vref ≦ Vs の関係にするため]抵抗[10KΩ]を追加。
乾電池の電源スイッチをOFFにすることを忘れないようにLEDを接続するが抵抗なしでLEDに電池4本分を接続してLEDを壊してしまった。次は間違えないように配線を再配置して必ず抵抗[330Ω]とつなぐようにした。
応用回路
TA7291Pデータシートに記載されている応用回路を図解する