何が出来るかな😀
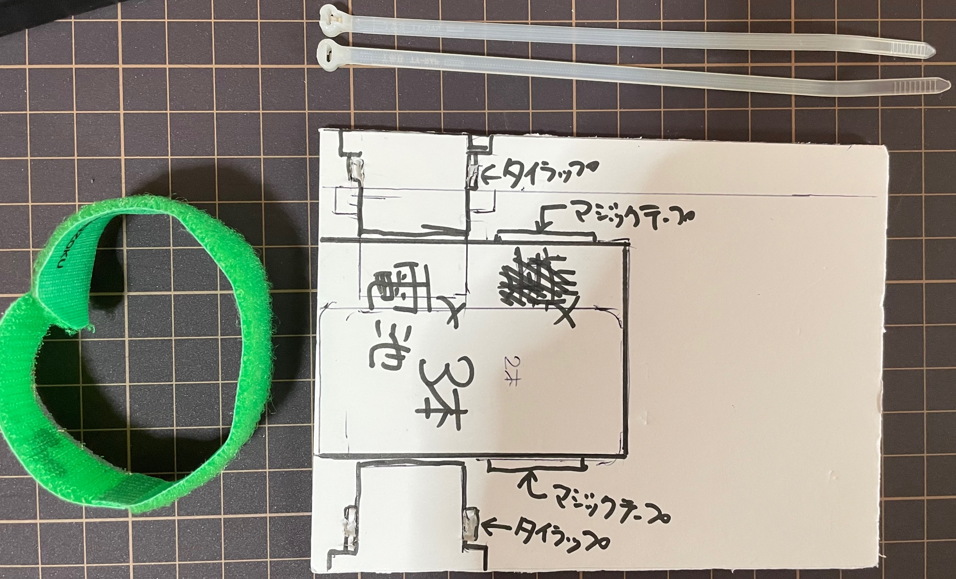
車体のレイアウト設計
モーター&タイヤ、乾電池BOXをスチレンボードに配置・固定する。タイラップ(インシュロック)とマジックテープで固定する。
乾電池BOXをマジックテープで固定するのは、乾電池を交換できるようにするため。
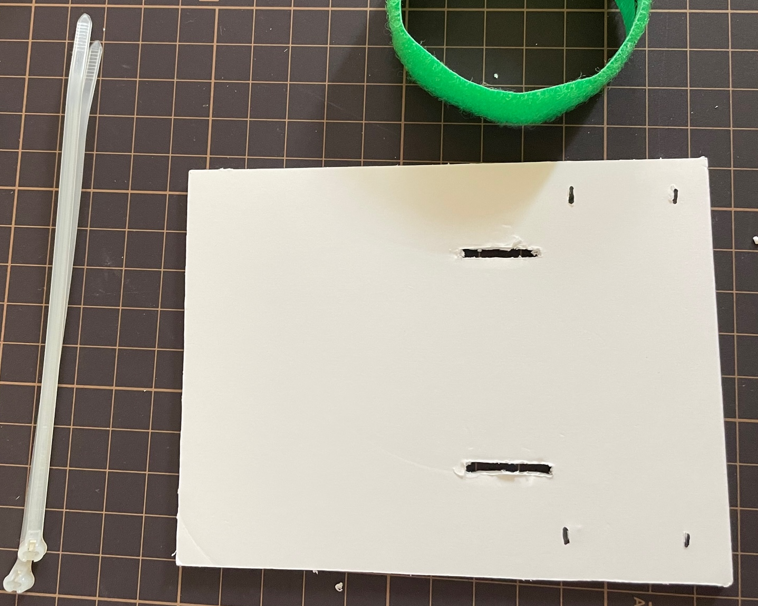
裏面の穴はこんな感じ
車体(部品の組み立て)
タイラップとマジックテープを使った固定方法は、漆畑メンターのアイディアです。いい感じに固定できました。
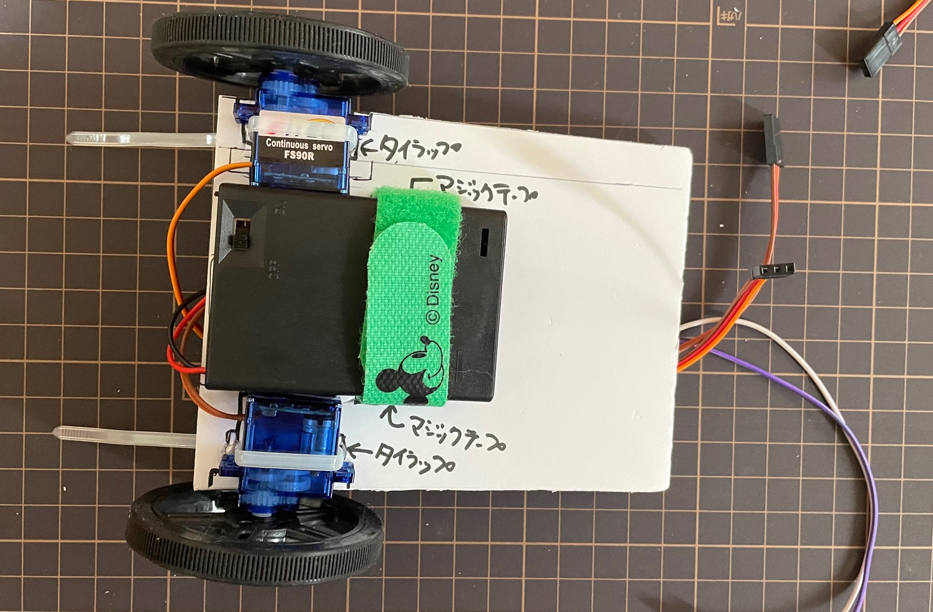
前輪はボール・キャスター

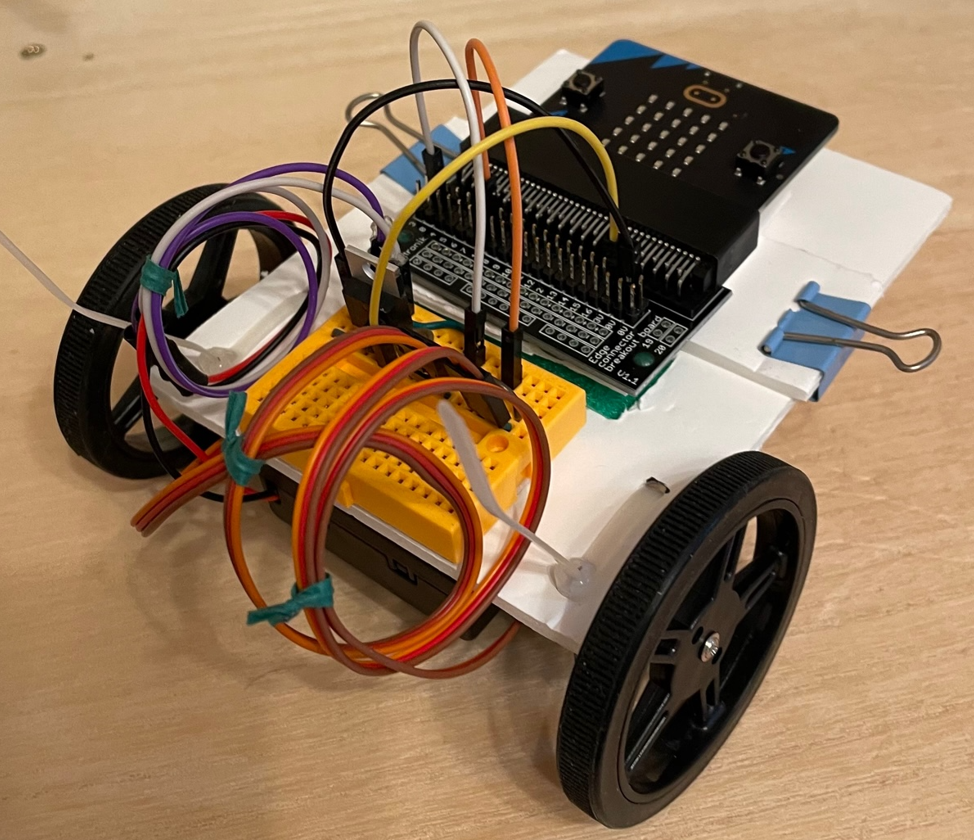
マイクロビット と ブレッドボード の配線
ブレッドボードは両面テープで固定した。
マイクロビットの拡張コネクタは、2枚目のスチレンボードに両面テープで固定し、とりあえずクリップで車体に固定してみた。
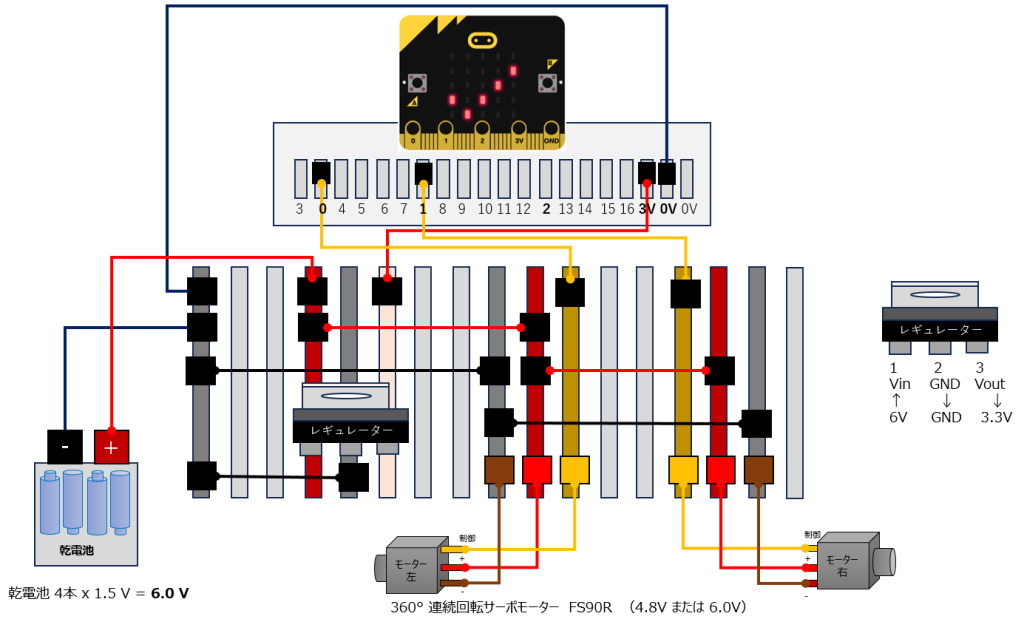
配線図
ブレッドボードとマイクロビット拡張コネクタの配線。慎重にね。
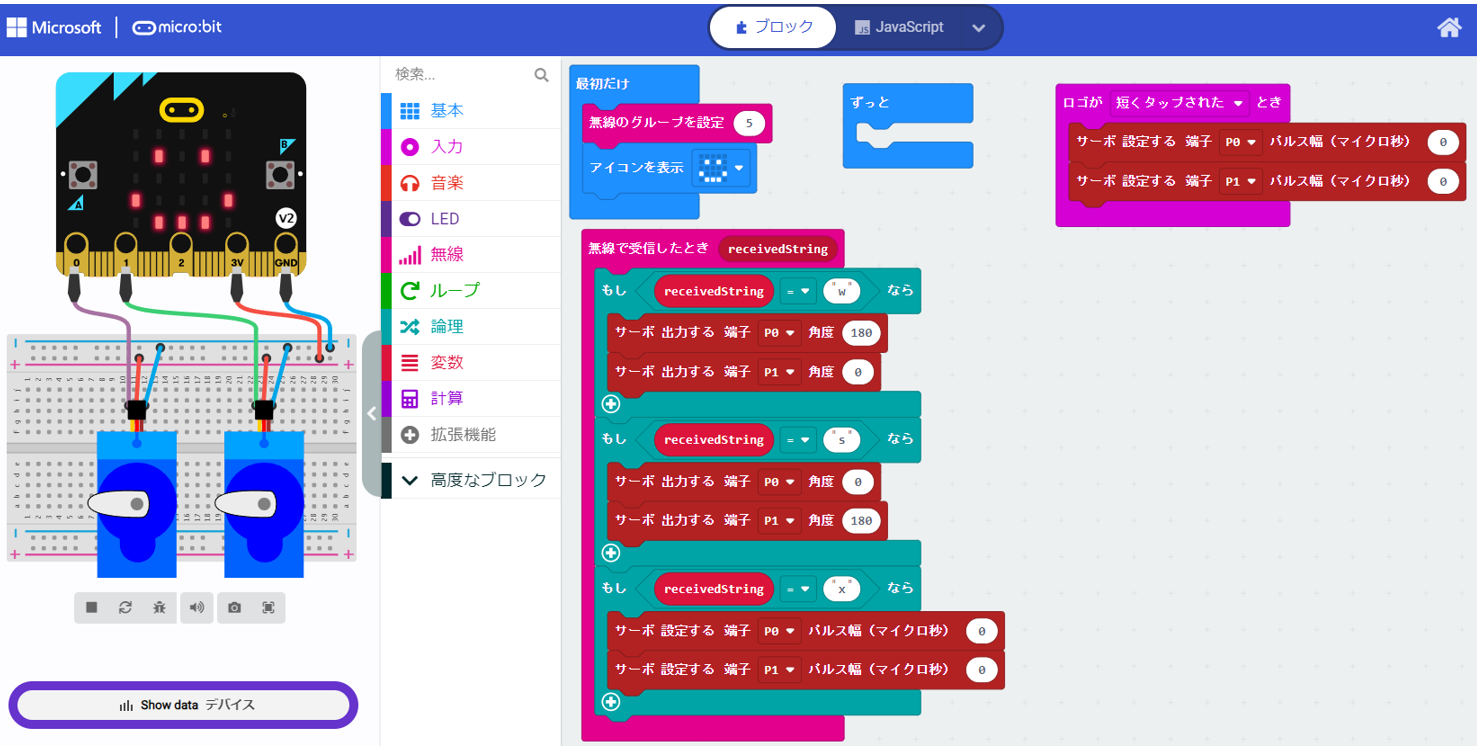
プログラミング(レシーバー側)
前進と後進の最低限のコードです。
左右移動やセンサー検出はつくっていないので、みんなで考えてみてください。
プログラミング(リモコン側)
前進更新・左右のコマンド送信のコードです。
緊急停止ボタンもつけましょう。

ここまで動作テストする
- 車体の設計と組み立てができました。
- リモコン操作で、車体を前後・停止することができた。
サーボモーターの回転速度
makecodeの標準コードで、サーボモーターの前後回転ができました。
しかし左右回転は少しゆっくり移動したい。このようなときに回転速度の調整ができないようです(パルス幅を変えるくらいしかパラメータがない)。

そこで[拡張機能]です。[サーボライブラリ]を追加してみましょう
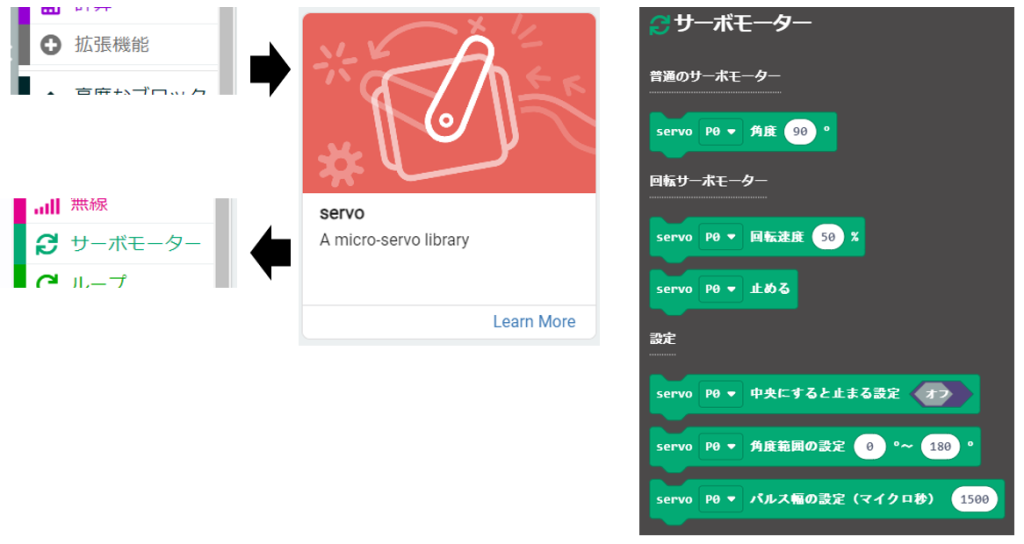
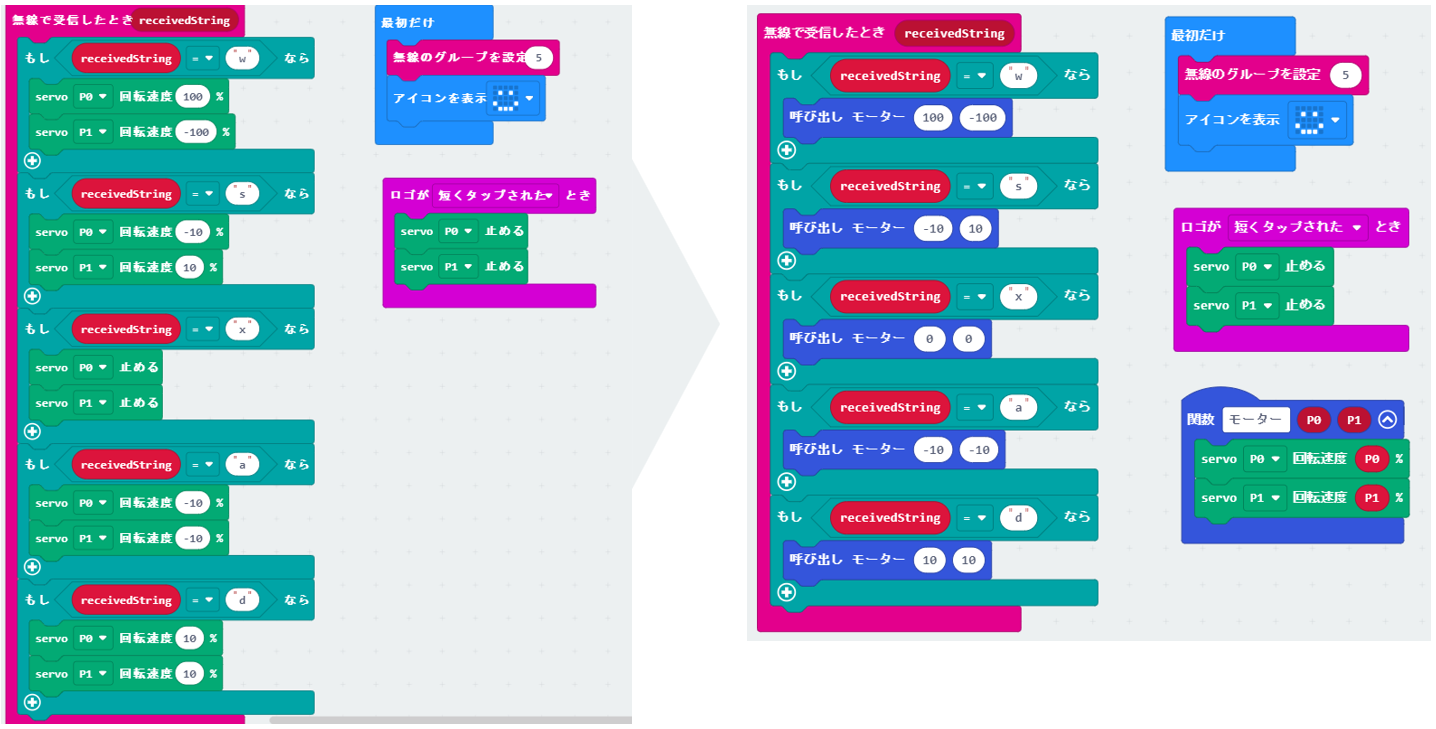
サンプルコードです。前進は[回転速度100%]、後進は[回転速度10%]でいい感じ。
ついでに関数を定義して、コードをシンプルにしました。Scratchでいう「ブロック定義」と同じです。

動作テスト
まとめ
できたこと
- 車体の設計と組み立てができた。
- リモコン操作で、車体を前後・停止することができた。
- リモコン操作の左右、後進は、ゆっくり低速で移動できた。
できなかったこと
- 直進しようとするとちょっとだけ右側にズレて移動する。
次にやること
- 車体側のLEDで受信できたことを表示したい。
- センサーを追加したい(ライントレース)
- センサーを追加したい(障害物検知・アイサイト的なやつ)
ライントレースと障害物センサーを使ってみたいです。
https://www.switch-science.com/products/6148?_pos=8&_sid=867b252cc&_ss=r
こんなのはどうですか?