コマンドプロンプト[cmd.exe]でラズパイにログインして nano エディタでプログラム・コードを書いています。コピー&ペーストがやり難いという悩みもあるので、いよいよ楽するために Visual Stduio Cod […]
VS code でコードを書こう

コマンドプロンプト[cmd.exe]でラズパイにログインして nano エディタでプログラム・コードを書いています。コピー&ペーストがやり難いという悩みもあるので、いよいよ楽するために Visual Stduio Cod […]

CoderDojo青梅で使う初期設定済みのマイクロSDを使います 準備:ラズパイをノートPCに接続する ノートPCからラズパイにログインしたいので、有線LANケーブルで、PCとラズパイのLAN端子に接続する。 Linux […]
あっというまに大会になり、一瞬で終わりましたね。今年からこのように結果を書き込んで行けたらなと思います。 1.競技内容 競技内容は の3つです。くわしいルールやコースはhttps://funnygeekjp.com/mn […]
続きを読む… from コーダー道場 青梅カップ2024結果

あっというまの1年間でした。Pythonコマンドとカクカク映像での運転を改善するため、MJPGストリーミングと見た目のかっこいいWEBダッシュボードを開発した1年間です。この成果を2025年3月9日(日)午後の部で発表し […]

どうもこんにちはryujiです。今回はGBevelopでゲームを作って見ました。 GBevelopとは まず、そもそもGBevelopはとは何かというと、無料で本格的なゲームを作るアプリです。またこのアプリは本格的なアプ […]
続きを読む… from GBevelopでゲームを作って見た
どうもこんにちはけいたろうです。今回は簡単なJSONハッキングを利用してSCRATCHで変なブロックを作っていきます。 JSONハッキングとは? Jsonハッキングは、ファイルの中身を書き換えて見た目や内容を変更すること […]
続きを読む… from Scratchで変なブロックを作る方法

ラズタンクに赤外線障害物センサー2個を追加して、障害物を回避しながら自動走行する 追加した部品(IR赤外線障害物回避センサー) ラズタンク(ここまでの完成の姿) センサーの感度調整 このセンサーは障害物までの距離を変更( […]

ボタンを押したら、何かひとつだけ動くすごく単純なコードから練習してみます。 ボタンを押してテキストを表示する HTMLファイルを新規作成 最小限のHTMLファイルを新規作成します。ファイル名はどんな名前でも構いませんが拡 […]

たけさんのラズタンクと「かの」メンターのラズタンクのNode-REDフローが消えてしまった。消えてしまうと最初から作り直しなので、下記手順でときどきフローを保存しよう。 Node-REDフローの保存(書き出し) 保存先は […]
続きを読む… from 緊急!Node-REDフローは保存せよ

Node-REDのUIダッシュボードにキーボード操作できるAPIを追加する。ラズタンクのカメラ映像を見ながら[W][A][S][D]キーボードで前後左右に運転する。これならブラインドタッチでラズタンクを操作できるので競技 […]

API(アプリケーション プログラミング インターフェース)は、あるプログラムから別のプログラムの機能を使うしくみのこと。ラズタンクでは、メインとなるリモート操作パネルをフロントエンドの「 HTML + JavaScri […]
8個のLEDをアドレス指定して個別にRGBカラー表示できるNeoPixelを、マイクロビット(micro:bit)で操作するコードを試します。 その1.基礎編(赤・緑・青に点灯するコード) 3つのボタンを押したら、赤(R […]
続きを読む… from NeoPixel; LEDリング8個のサンプルコード
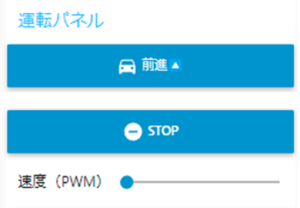
ラズタンク動作(前進のみ) Node-Redフローを設定する ラズタンク動作(停止する) Node-Redフローを設定する 動作テスト WEBブラウザのURL[http://razpi10.local:1880/ui]を […]
続きを読む… from Node-REDでラズタンク前進・後進(中級:ダッシュボードのボタンUI)
ラズタンク動作(前進のみ) Node-Redフローを設定する ラズタンク動作(停止する stop) Node-Redフローを設定する URL命令を呼び出してみよう 前進するときは[http://razpi10.local […]
続きを読む… from Node-REDでラズタンク前進・更新(上級:URL命令)
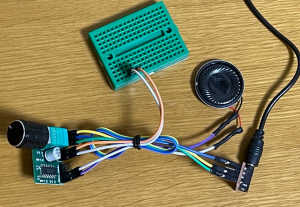
リモートで運転するラズタンク。遠隔地で救助を待つ被災者に、ラズタンクがやさしく話しかける。 配線図 ボリュームコントロールは、電源にもなっている様子(カチッというまで左に回すとOFF、カチッと右に回すと音量が大きくなる) […]
JavaScript の復習 まずは JavaScript を動かす基本を確認しましょう。ラズパイでもWindowsでも構わないので、どこかのフォルダに2つのファイル(test.html と test.js)を作ります。 […]
続きを読む… from WEBアプリをJavaScriptでつくる準備
宇宙船を月面に着陸させるゲーム。デコボコしている月面には着陸できません。安全に着陸できる平地を目指します。 このゲームのポイントは、矢印キーの方向にジェットを噴射するので、矢印キーと逆の方向に宇宙船が進むという難易度。宇 […]
続きを読む… from Scratch, 月面着陸(初級と中級)
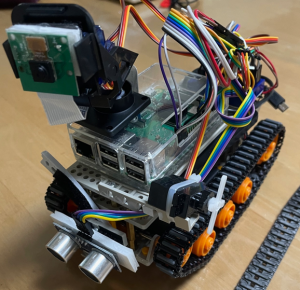
メンター「かの」のラズタンクには様々な改造が施されています。改造に使ったパーツを紹介します。 二軸カメラ土台 SG90サーボモーターを2個つなげて、ラズパイカメラを左右・上下に回転させる土台です。ガンダムに登場するザクや […]
どうも。けいたろうです。 今回は新式ICでの前進後進のプログラムを投稿します。 早速、プログラムを公開します。 重要!上のプログラムは0と1が入れ替わっているので注意してください⚠️(ごめんなさい) これが前進と後進のプ […]