PCブラウザに接続したUSBゲームパッドを操作する。ラズパイ側は python の websocket で待ち受け・受信する。 [ゲームパッド]ー[PCブラウザ]ー[Wi-Fi]ー[ラズパイ websocket] その1 […]
ゲームパッド python編

PCブラウザに接続したUSBゲームパッドを操作する。ラズパイ側は python の websocket で待ち受け・受信する。 [ゲームパッド]ー[PCブラウザ]ー[Wi-Fi]ー[ラズパイ websocket] その1 […]
Node-RED フローを準備する [USBゲームパッド]→[PCブラウザ]→ ネットワーク →[Node-RED] 新しいフローを開き、[websocket]と[debug]の2つのノードを配置します。 [websoc […]
CoderDojo青梅 午後の部の参加者に朗報です!これまでラズタンクのリモート操作は、第二期までPCキーボードの矢印キーで動かし、第三期はNode-REDのダッシュボードのボタンで動かしました。ダッシュボードはスマホ画 […]
カメラ映像は、jpgstreamを動かしてからNode-REDダッシュボードでカメラ映像を表示します。 ノードの構成 [template]ノードは、ダッシュボードのUIを指定する [template]ノードのHTMLコー […]
続きを読む… from Node-REDにカメラのストリーミングを表示
Node-REDの起動から、はじめてのアプリ開発まで手順を紹介します Node-REDはブラウザで動きます。起動させてみましょう。 1.PCのブラウザで、リモートのラズパイに接続できるか検査 自分のラズパイ番号でアクセス […]
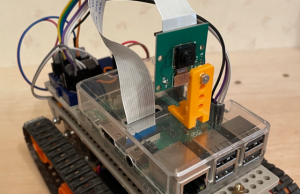
こちらのスクリプトは、Raspberry Piとカメラ、モーターを組み合わせて、赤色の物体を検出しながらラズタンク(ロボットカー)を自動運転するプログラムです。 プログラムの概要 目的: 特徴: ステップごとの解説 ① […]
続きを読む… from 動画分析してラズタンクを自動運転するPJ

AボタンとBボタンでサーボモーターを操作したい。という質問を頂きましたのでコードを紹介します。サーボモーターは0°から180°まで動くとします。最初は90°の位置、つまり真ん中にいます。Aボタンを押したら、180°この場 […]
続きを読む… from micro:bit でサーボモーターを動かす
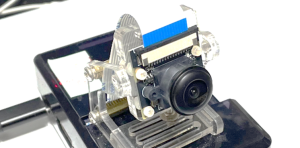
ラズベリーパイ(Raspberry Pi 3B+)の標準カメラの視野は狭い。ラズタンクを操作するが足元や左右を見渡せないので他のラズタンクにぶつかったり、見えないので横の壁にぶつかったりする。AliExpressで約60 […]

コマンドプロンプト[cmd.exe]でラズパイにログインして nano エディタでプログラム・コードを書いています。コピー&ペーストがやり難いという悩みもあるので、いよいよ楽するために Visual Stduio Cod […]

2025年度のラズタンク開発者に、四期生3名の参加が決定しました!部品調達と加工の下ごしらえも着々と進んでいます。お楽しみに! 部品調達 タミヤの部品「ユニバーサルプレート、ダブルギヤボックス」が生産終了で困っていました […]
続きを読む… from ラズタンク開発(四期生のみなさんへ)

CoderDojo青梅で使う初期設定済みのマイクロSDを使います 準備:ラズパイをノートPCに接続する ノートPCからラズパイにログインしたいので、有線LANケーブルで、PCとラズパイのLAN端子に接続する。 Linux […]
あっというまに大会になり、一瞬で終わりましたね。今年からこのように結果を書き込んで行けたらなと思います。 1.競技内容 競技内容は の3つです。くわしいルールやコースはhttps://funnygeekjp.com/mn […]
続きを読む… from コーダー道場 青梅カップ2024結果

あっというまの1年間でした。Pythonコマンドとカクカク映像での運転を改善するため、MJPGストリーミングと見た目のかっこいいWEBダッシュボードを開発した1年間です。この成果を2025年3月9日(日)午後の部で発表し […]
ラズタンク開発の技術ドキュメント一覧がなかったのでリストを整理します 構想 カメラ映像 プログラミングサンプル 応用編(自動運転) Node-RED操作 ラズパイ組み立て インターネット 開発環境 工具/部品 Linux […]
CoderDojo青梅 午後の部ではラズベリーパイ&電子工作をテーマに、プログラミングを遊んで学習しています。2022年から子どもたちの意見を取り入れつつ、ラズタンクを進化させて今年は4年目、4期生を募集することになりま […]

ラズタンクに赤外線障害物センサー2個を追加して、障害物を回避しながら自動走行する 追加した部品(IR赤外線障害物回避センサー) ラズタンク(ここまでの完成の姿) センサーの感度調整 このセンサーは障害物までの距離を変更( […]

Node-REDのUIダッシュボードにキーボード操作できるAPIを追加する。ラズタンクのカメラ映像を見ながら[W][A][S][D]キーボードで前後左右に運転する。これならブラインドタッチでラズタンクを操作できるので競技 […]

API(アプリケーション プログラミング インターフェース)は、あるプログラムから別のプログラムの機能を使うしくみのこと。ラズタンクでは、メインとなるリモート操作パネルをフロントエンドの「 HTML + JavaScri […]

レジンという光に当てると固まる液体がある、と教えてもらったのでやってみた。材料は、UV-LEDレジン星の雫ハードタイプ30g透明が1,500円、そしてシリコンモールド(型)。名前がUV-LEDだけど、電気で点灯するLED […]