こんにちは隆慈です。初めての巻物の投稿です。よろしくお願いします。初めての巻物は「二台micro:bitの無線接続の通信確認」です。まずは、完成形を見せます。 完成形 機構開設 まず、起動したら、送信側のmicro:bi
二台micro:bitの無線接続の通信確認

こんにちは隆慈です。初めての巻物の投稿です。よろしくお願いします。初めての巻物は「二台micro:bitの無線接続の通信確認」です。まずは、完成形を見せます。 完成形 機構開設 まず、起動したら、送信側のmicro:bi
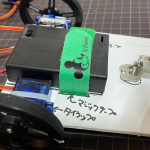
何が出来るかな😀 車体のレイアウト設計 モーター&タイヤ、乾電池BOXをスチレンボードに配置・固定する。タイラップ(インシュロック)とマジックテープで固定する。乾電池BOXをマジックテープで固定するのは、乾電池を交換でき
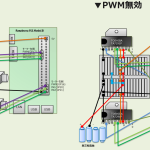
PWMによるスピード調節がうまく動かないので今回は一定速度で再設計する。ラズタンクの前進速度がハイスピード、後進がスローにしたかったので、PWM(パルス信号)を使う方式を検討した。前進100%スピード、後進50%スローと
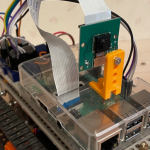
ラズパイカメラ・モジュール(レガシーカメラ) 【注意】※最新のラズパイOSでは基盤に実装するカメラが非対応と悲しい。「Raspberry Pi OS (Legacy)」をインストールして使います。 本日のメニュー 開発者

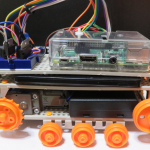
ラズベリーパイを搭載したトラックベルト駆動(キャタピラ)の走行車を組み立てした。次はメディア系の機能を搭載する。 本日のメニュー 準備[PCでラズパイにリモートデスクトップ接続] Windows の DOS でラズパイか

ペーパークラフトのパワーショベルに、サーボモーターを内蔵してmicro:bitで操作してみました。 あおぞら社で販売している Paper Model の カーズクラフトシリーズの Power Shovel を改造しました
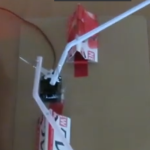
サーボモーターを簡単に試せるので、ダイナミックな動作を生み出したい。 と思って、家中の材料を探して回ってなにか使えないかなーっと、見つけたのがストロー。この動作で何かできないかな。 動画(youtube)表示されるまでち
目次(ラピロに実装した機能) ラズパイが喋る(音声合成) 使い方:テキスト文字をイヤホンスピーカーで読み上げます。Linuxでシェルコマンドを実行します(pythonではありません)。 #実行結果 記事:<http
レーザーポインタは危険性を理解して、安全に使わなければなりません。 メンターの岩田さんからいただいたレーザーポインタで遊んでみました。ブレッドボードに接続できるようにジャンパーケーブルをハンダ付けして、単三乾電池2本(3

ラズベリーパイを搭載したトラックベルト駆動(キャタピラ)の走行車を組み立てする 部品構成 ダブルギアのギヤ比を決定し、組み立て図通りに組み立てする モーターと電池ボックスのケーブルは、ブレッドボードに接続できるようにジャ
Pythonコードを実行前に、「キーボード入力を読み取るライブラリreadchar」をインストールします 以下がラズタンクのpythonコードです。例えば[$ sudo nano tank.py]などで新しいファイルを作

ラズパイのコンピュータ名(ホスト名ともいう)を自分専用の名前に変えよう。 どんないいことがあるの? SSHで接続するとき、IPアドレスでアクセスするよね[ $ ssh pi@192.168.1.2 ]とか。 Window
下記のファイル名で新規ファイルを作成して、設定を記入すると矢印キーやBackSpaceキーが使えるようになる。 これだけ。 操作手順1.ファイルを作成してファイルに書き込む 操作手順2.下記のファイルを書き込む 操作手順
構成 Linuxで一番利用されているWEBサーバー「アパッチ(Apache)」のバージョン2系をインストールする 事前準備:自分のWi-FiアクセスポイントにWindowsパソコンで接続しておく。Windowsコマンドプ

購入リスト OSインストール 今まではインターネットからダウンロードしたOSイメージを Windows PC の SDカードライターアプリ で microSDカード にRaspberry Pi OSを書き込んでいました。

GPIOにサーボモーターを繋いで、何か動かす サーボモータは[+5V][GND][GPIO出力]の3本をラズパイに接続する サーボモータを操作する python プログラム 実行方法1.角度を指定するとき 実行方法2.秒

CoderDojo青梅 WEBサイト のトップページには、東芝Libretto 30(リブレット)の小さな画面にラズパイが表示されています。この専用ディスプレイ[5 inch HDMI Display-B (800 x

ラズパイをアクセスポイント化して、PCからラズパイに直接アクセスします。 目的:なぜアクセスポイント化するのか? CoderDojo青梅の会場にはWi-Fiルータがひとつしかありません。例えば10人が参加するとき、ひとつ
日本語キーボードの設定(英語版はずっと下段↓) ラズパイを快適に使うための設定(日本語キーボードに変える)・ラズパイのデフォルトキーボードはUS配列。・日本語ノートPCのキーボードならJIS配列。 ターミナルでラズパイの
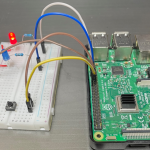
身近なロジックのひとつに「押しボタン式信号機」がある。ラズパイ+LED+ボタン+Pythonで試してみよう。間違ったロジックをつくると交通事故になっちゃうぞ。 ラズパイGPIOの配線図 このサンプルでは「押しボタン」の入